
【相聚云端 精彩毕设】毕业设计(论文)中期检查案例分享 机械工程学院第十三期
——下肢康复外骨骼人机交互动力仿真研究
2020年春季学期,一场突如其来的疫情,阻挡了学生们返校的脚步,影响了2020届毕业生毕业设计(论文)进展。为做好毕业设计(论文)指导工作,学院多次召开线上会议,研讨毕设线上指导工作,制定《机械工程学院2020年春季学期防疫阶段本科毕业设计实施方案》、《机械工程学院2020年春季学期防疫阶段本科毕业设计相关要求》、《机械工程学院关于开展2020届本科生毕业设计(论文)中期检查方案》。毕设指导教师积极完成毕设学生情况梳理,并根据学生实际情况进行分类指导,利用“云端”开展线上毕业设计(论文)指导工作,在疫情期间将毕业设计(论文)进展所受影响尽力减到最小,确保毕业设计(论文)质量线上线下实质等效。毕业设计中期检查工作中,同学们精心准备,认真答辩,积极展示毕业设计取得的阶段性成果,就让我们一睹为快吧:

学生姓名:周 涛
班 级:交控2016-04班
指导教师:李怀仙
毕设题目:下肢康复外骨骼人机交互动力仿真研究

1.概况
随着科学技术的发展和医疗水平提高,人均寿命延长,社会老龄群体和运动功能障碍患者数量逐年上升,同时因脑卒中和脊椎损伤(Spinal Cord Injury,SCI)问题,下肢瘫痪高发成为社会一大难题,因而对辅助运动和运动功能恢复的需求量十分巨大。
传统恢复方式是由具有一定经验的康复医师一对一地对患者进行康复训练,该方法治疗效果好,但康复医师稀缺,治疗成本高,治疗的时间、地点受限。为此,国内外医疗机构通常选用医疗机器人代替治疗师进行康复训练,但是目前可穿戴下肢康复外骨骼机器人的发展还有一些局限性,例如体积庞大,价格高昂,并且多数以被动训练为主,患者训练过程僵硬康复效果较差。
本次毕业设计基于上述背景,对具有非线性、强耦合性特点的下肢外骨骼系统进行动力学建模与分析,设计系统人机交互方式以及控制方案,使患者在康复训练中逐步提升下肢肌肉力量恢复运动能力。在此基础上进行人机交互动力学仿真,观察仿真效果,为下肢康复外骨骼机器人的研究与开发提供理论依据。
2.主要内容
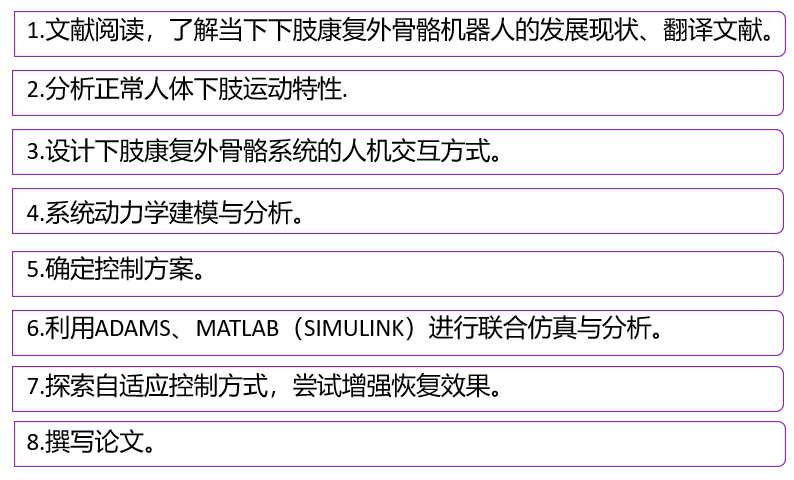
3.毕业设计进展情况
目前已完成主要内容中的(1)到(6)条。主要的工作可以分为以下四部分。
(1)在分析下肢运动特性的基础上获取人体行走过程中下肢关节角度变化数据,利用FFT算法进行傅里叶变换,将离散的测量数据逆合成完整的角度变化曲线,作为下肢康复外骨骼系统的参考步态轨迹。
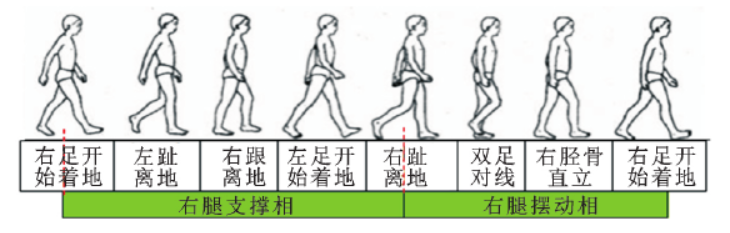
人正常人体步态
(2)将外骨骼和患者的交互力简化为阻抗模型,依据阻抗模型设计阻抗控制算法让外骨骼表现出期望的柔性,同时外骨骼机器人可以通过阻抗模型感知到患者的残余肌肉力量,从而适应性的调整训练轨迹。这样外骨骼机器人和患者之间就在物理层面上建立了力的交互,同时能够在认知层面上使患者了解外骨骼的能力,始终能有自己在控制外骨骼机器人的感觉。
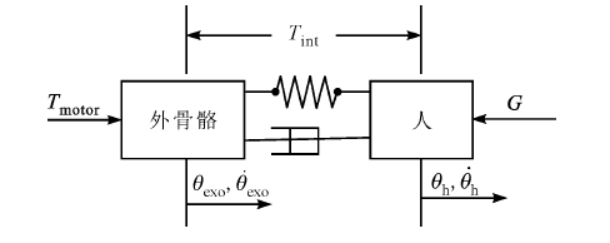
人机交互阻抗模型
(3)对下肢康复外骨骼系统进行动力学建模和分析,利用拉格朗日法求解系统动力学方程,解出外骨骼机器人关节驱动力矩的关系式,并在内层控制中添加PD控制器,控制关节角度变化。同时完善下肢康复外骨骼系统的控制方案,采用层次化的控制结构,将阻抗控制设置为外层控制,完成基于位置的阻抗控制策略。
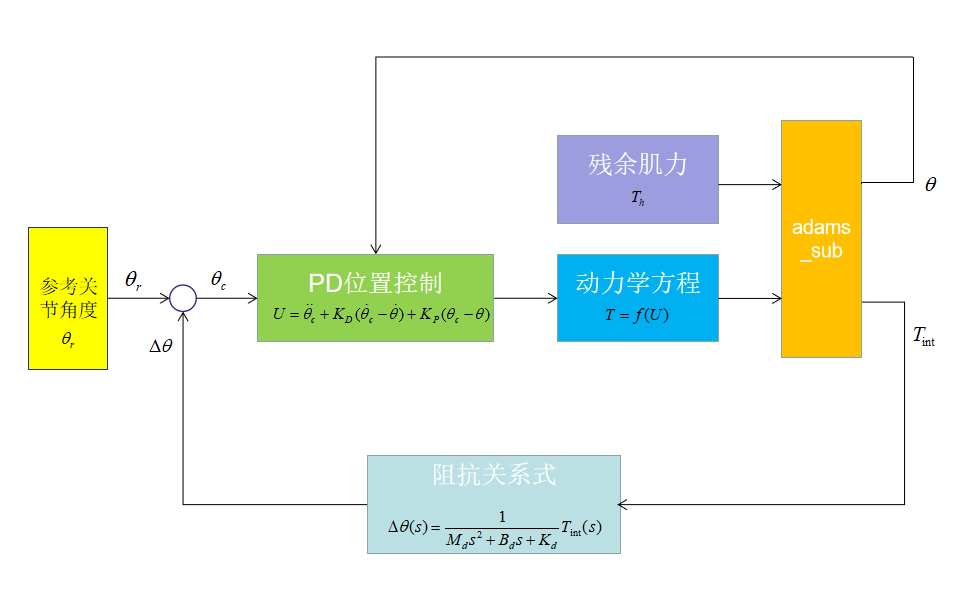
控制策略方框图
(4)利用ADAMS和MATLAB(SIMULINK)进行建模,并联合仿真,初步得出下肢康复外骨骼系统的训练效果。并继续探索系统的改进和优化。在此基础上完成60%的论文撰写工作。
4.后续工作计划
(1)继续撰写论文,查重并修改;
(2)优化动力学模型;
(3)研究自适应控制,如自适应阻抗控制、自适应滑膜控制等。

在答辩过程中向教研组老师描述了毕业设计的基本思路和完成情况,展示各部分主要内容,以及初步的仿真结果分析。着重阐述了动力学模型和基于位置的阻抗控制策略。最后老师们对本次毕业设计提出了改进意见。

本次毕业设计让我接触到一个较为前沿的研究领域,让我有机会将所学的课程知识应用到实际场景中。在此过程中体会到科学技术的进步对人的影响巨大,科研人员的工作能够切实的为社会解决诸多问题。
详细的说,在本次毕业设计过程中我学习了文献的查找和阅读方式,了解了机器人领域的发展现状,对人机交互、动力学分析、机器人控制等内容有了较为深入的理解。这样一次设计与实现的过程也会成为我今后学习与工作的样板,不断地提出问题、解决问题给了我深入研究的指引和动力。
感谢认真负责的李怀仙老师在疫情期间克服诸多困难定时定期地给予我们帮助,李老师提出的方向性指导和各种注意事项让我的毕设之路更加的顺畅。