
【相聚云端 精彩毕设】毕业设计(论文)中期检查案例分享 机械工程学院第二十期
——绝缘子检测机器人驱动机构设计及运动仿真
2020年春季学期,一场突如其来的疫情,阻挡了学生们返校的脚步,影响了2020届毕业生毕业设计(论文)进展。为做好毕业设计(论文)指导工作,学院多次召开线上会议,研讨毕设线上指导工作,制定《机械工程学院2020年春季学期防疫阶段本科毕业设计实施方案》、《机械工程学院2020年春季学期防疫阶段本科毕业设计相关要求》、《机械工程学院关于开展2020届本科生毕业设计(论文)中期检查方案》。毕设指导教师积极完成毕设学生情况梳理,并根据学生实际情况进行分类指导,利用“云端”开展线上毕业设计(论文)指导工作,在疫情期间将毕业设计(论文)进展所受影响尽力减到最小,确保毕业设计(论文)质量线上线下实质等效。毕业设计中期检查工作中,同学们精心准备,认真答辩,积极展示毕业设计取得的阶段性成果,就让我们一睹为快吧:

学生姓名:曾 锐
班 级:机械2016-06班
指导教师:刘 放
毕设题目:绝缘子检测机器人驱动机构设计及运动仿真


一、概况
绝缘子在运行过程中因长期受外界恶劣环境的影响下,容易产生不良绝缘子,而任何一串绝缘子出现问题,都会对造成电力安全造成很大危害,故需要对不良绝缘子进行有效检测。根据国内外对绝缘子检测的工程研究现状看,并没有使得实际问题得到有效的解决,故现在迫切需要研究出一种新型的绝缘子检测机器人。因此本毕设将分以下几步对绝缘子检测机器人进行研究:
(1)提出绝缘子检测机器人驱动机构的可行方案;
(2)根据结构设计原则,对检测机器人各关键构件进行结构参数设计;
(3)建立检测机器人空间运动轨迹数学模型并进行仿真分析;
(4)建立检测机器人驱动机构的力学模型并进行仿真分析;
(5)根据结构设计尺寸,完成检测机器人的工程图纸以及三维模型建立。
二、已完成工作:
(1)驱动机构方案的设计,方案设计如图1、图2和图3所示
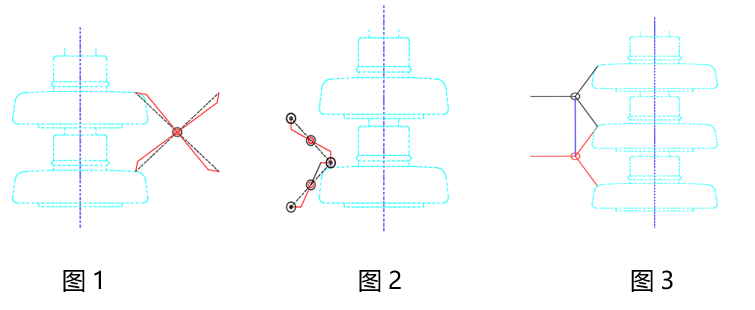

综合各方案的优缺点,方案二的机构型式最佳。
(2)驱动齿轮副结构设计,方案设计如图4所示
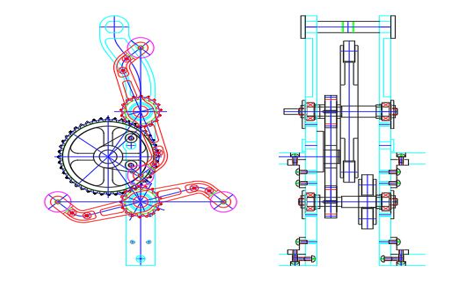
图4 驱动机构齿轮副设计图
驱动齿轮副设计的作用不仅可以使得上下两个攀爬爪实现机械传动同步,还可以将步进电机的额定扭矩以传动比的大小扩大,以确保攀爬爪有足够的动力和扭矩带动机器人沿绝缘子串轴线直线运行。
(3)检测机器人的空间运动轨迹数学建模,对于该检测机器人的攀爬爪机构来说,属于机构的正运动学问题,即已知攀爬爪的旋转角度![]() ,求攀爬爪旋转中心的坐标。由于攀爬爪在工作时是上下两个爪交替进行的,攀爬爪的运动学规律改变在于攀爬爪和绝缘子表面是否有接触,故其运动学方程需要分段考虑。
,求攀爬爪旋转中心的坐标。由于攀爬爪在工作时是上下两个爪交替进行的,攀爬爪的运动学规律改变在于攀爬爪和绝缘子表面是否有接触,故其运动学方程需要分段考虑。
检测机器人的位移方程为
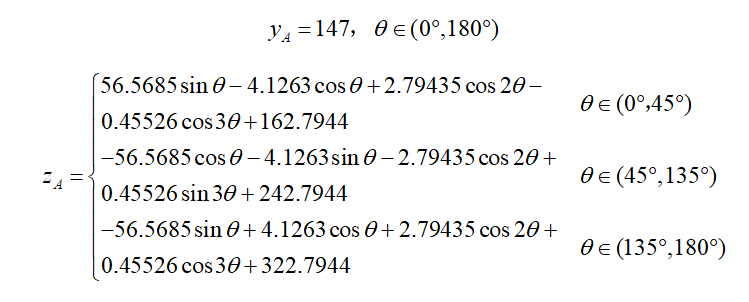
检测机器人的速度和加速度方程只需对其位移函数依次求导即可。
其运动学仿真图分别如图5、图6和图7所示,显然其速度和加速度曲线是周期性变化的,这体现了检测机器人在步进电机的作用下于绝缘子串上运动的周期性,其一个周期的数值变化可以反映检测机器人在整个运动过程中的变化。、
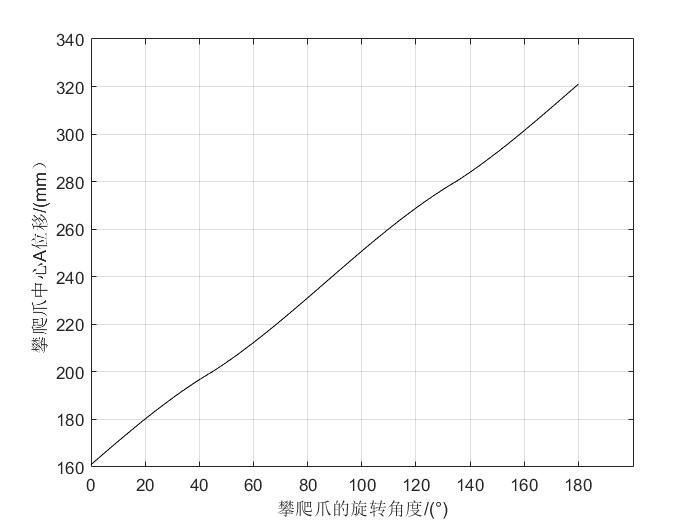
图5 攀爬机构中心的位移曲线图
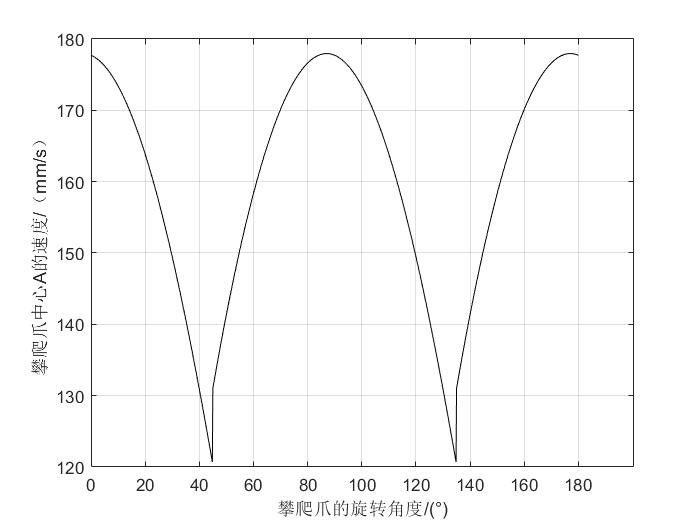
图6 攀爬机构中心的速度曲线图

图7 攀爬机构中心的加速度曲线图
(4)攀爬机构的力学分析,如图8所示,绝缘子对攀爬机构的支反力属于空间力系问题,故为每个接触受力点建立对应的空间直角坐标系。由于检测机器人的运动具有周期性,并且攀爬爪是交替接触在绝缘子表面上的,在旋转角度区间为45°![]() 135°时,攀爬爪一端始终接触在绝缘子表面,在下个循环区间也是如此,故取旋转角度区间为45°
135°时,攀爬爪一端始终接触在绝缘子表面,在下个循环区间也是如此,故取旋转角度区间为45°![]() 135°进行受力分析。
135°进行受力分析。
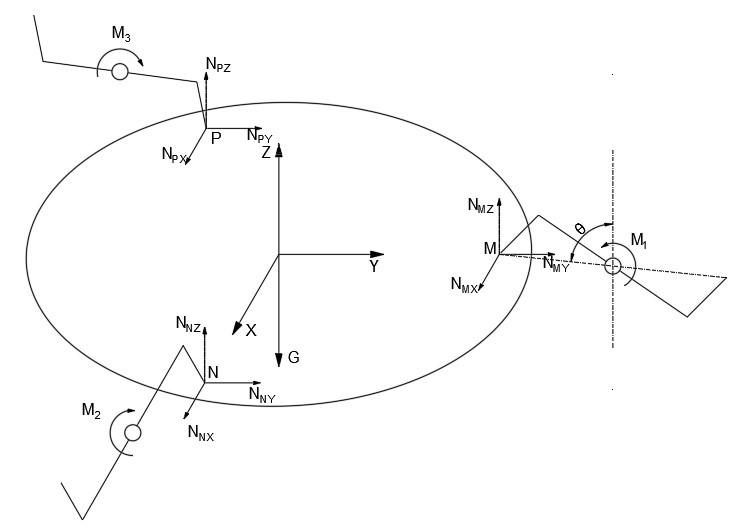
图8 检测机器人攀爬机构的受力分析图
各接触点支反力的各轴分力及转矩大小如下

其中检测机器人的转矩仿真图形,如图9所示,图中的最大转矩值为后续驱动电机的选型及功率计算提供了重要的理论参数。
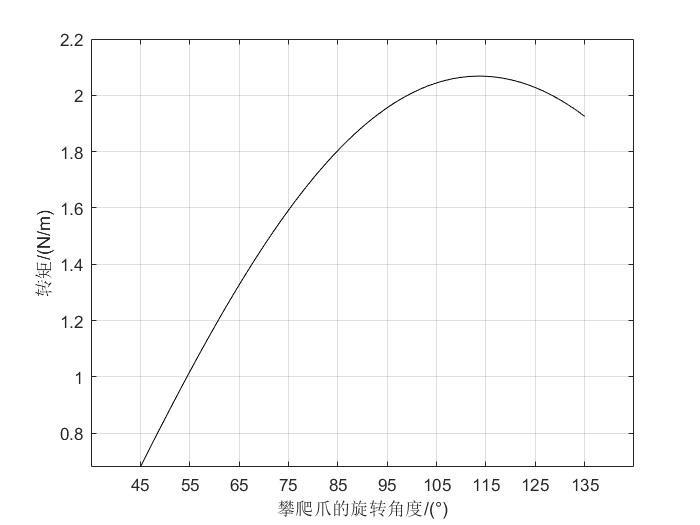
图9 转矩曲线图
(5)检测机器人的三维建模,主要结构件包括攀爬机构、启闭机构、主电源安装架及主电源、备用电源安装架及备用电源、闭合段框架、导轨条、同步带和绝缘子检测仪等。根据绝缘子检测机器人以环形配置和旋转攀爬式的特点,对绝缘子机器人整体模型进行装配,其机构模型如图10和图11所示。

图10 同步旋转双臂机构
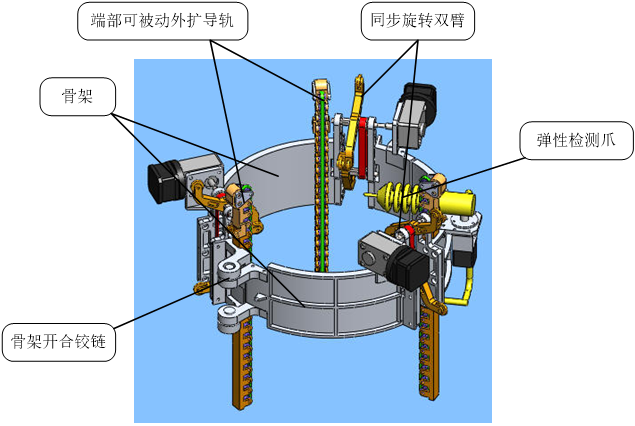
图11 检测机器人的整体机构模型
(6)完成检测机器人的各零件图、驱动机构齿轮副装配图以及装配总图的绘制。毕业论文按照毕业设计论文规范完成至49页共18622字。
三、下一步工作计划
继续完善和完成毕业设计论文,完成外文翻译工作,整理毕业设计资料,准备毕业设计答辩。

问题1:在曲线仿真处,为何不采用adamas软件进行仿真而采用Matlab软件?
答:在本论文中,绝缘子曲面方程是由取点拟合的方程,绝缘子的三维建模存在一定误差,虽然adamas和solidworks中的motion插件都可以进行检测机器人的仿真,但为了简化方便,可以直接利用Matlab进行仿真。
问题2:你在分析方案3时,怎么体现其缺点中产生的冲击效应很大的问题?
答:从方案二的速度与加速度仿真曲线图,可以看出其速度突变和加速度突变都发生在旋转角度为45°和135°的时刻,即攀爬爪恰好与绝缘子表面接触的时刻,因而可以分析得出在同一周期内,攀爬爪与绝缘子表面接触次数越多,其速度和加速度突变次数就越多,其产生的冲击效应就越大。应用到方案三,其攀爬爪与绝缘子表面的接触次数最多,其冲击效应就最高。

从2019年12月份末到现在的4月份中旬,我坚持每天抽出一个上午或者一个下午的时间来弄毕设。刚开始的我仅仅是为了尽快完成毕设任务,到后来发现毕设不单纯是为了完成任务,更主要是为了培养自身解决问题的能力。毕设不是大学课程以往布置的小作业,它是将前面大学三年所学的专业基础知识融合在一起的大作业,需要自身在巩固以往所学知识的基础上不断地学习新的知识。
在毕业设计初期进行时,我存在资料文献阅读的乏力,对结构设计的茫然,理论力学知识的忘却,数学模型难以构建,相关软件的应用不够熟练等问题,到后来通过几个月的自我要求,我翻阅大量的机械结构设计手册,回故以往的理论力学课本,加强软件的熟练程度以及不断地向刘放老师咨询毕设存在的问题,我对毕业设计的理解更深入了一个层次,也加快了完成毕业设计工作的节奏,所以我十分坚信只要自身肯不断钻研学习,就能解决看似很难的问题。
在毕设的后期进展中,我一定积极与指导老师联系讨论论文不足之处,尽力所能完善和完成毕业设计论文的撰写,不断提升对毕业设计的研究深度,接受大学生涯的最后一次检验。