
【机情无限 精彩毕设】机械2023届毕业设计(论文)中期检查优秀案例分享第十三期——六轴串联机器人运动可靠性分析研究

学生姓名:缪家振
班生姓级:机械2019-07班
指导教师:俞水
毕设题目:六轴串联机器人运动可靠性分析研究


一、概况
1.选题意义
随着工业技术的不断提高,工业机器人技术也突飞猛进,串联机器人越来越多的应用于工业生产过程中,且逐渐向着高可靠性、高精度、智能化等方向发展。在工业制造领域,串联机器人不仅应用于汽车焊接、铸造成型、搬运等作业,也开始应用于诸如尺寸检验、精密装配等要求较高的作业。因此,作业场景中对于串联机器人的运动精度可靠性的要求也是越来越高,对此方面进行提高已经成为机器人智能发展的重要研究方向。
机器人在实际制造加工及装配的过程中,总是会产生误差,同时在工作过程中各关节之间互相磨损也会使运动副之间产生间隙等,受这些因素的影响,机器人的理想运动与实际运动必然会产生偏差。因此,对串联机器人受多种因素共同影响下的运动精度可靠性进行研究非常有必要,具有较强的研究价值。
2.任务分解
(1)了解和掌握串联机器人的现状和发展趋势,结构设计与分析的基本方法和手段;
(2)掌握机器学习可靠性分析的常规计算方法;
(3)完成串联机器人机构分析和运动学建模;
(4)构建串联机器人可靠性数学模型,基于机器学习算法,完成串联机器人可靠性分析;
(5)撰写毕业设计论文、翻译专业相关的外文资料(6000-10000单词)。
二、已完成工作
1.ER50机器人的机构分析
ER50机器人是典型的六轴串联机器人,由基座开始往上,共拥有六个旋转关节,通过控制六个连杆转角的角度来控制末端执行器的位姿,进行相应的作业,结构模型如图1所示。
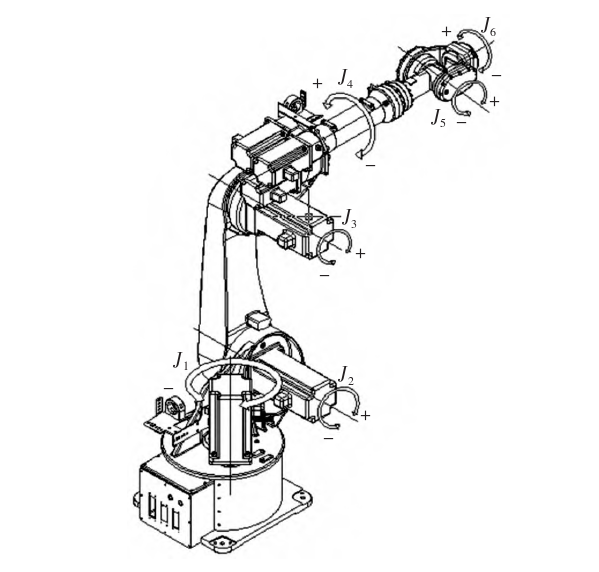
图1 ER50机器人结构图
2.运动学模型的建立
运用D-H法来建立ER50机器人的运动学模型。所研究的ER50机器人共有六个自由度,需要建立七个坐标系,但是为了合理简化计算,我们将第一个关节的坐标系与基底坐标系重合,自下而上,依次建立六个坐标系。各个连杆长度为![]() ,连杆扭角为
,连杆扭角为![]() ,连杆距离即两法线距离为
,连杆距离即两法线距离为![]() ,以上为六机器人运动学模型的固有参数;通过输入控制量连杆转角
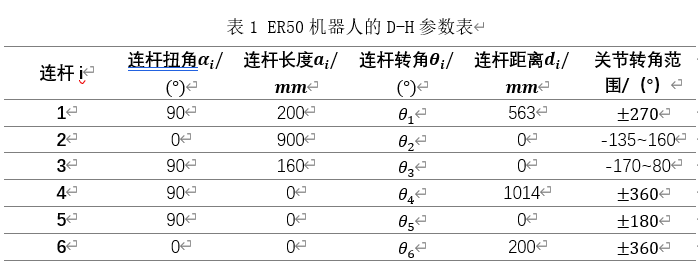
,以上为六机器人运动学模型的固有参数;通过输入控制量连杆转角![]() 来控制末端执行器的位姿,其中各个关节转角的范围为已知量,连杆坐标系如图2所示,ER50机器人的D-H参数如表1所示。
来控制末端执行器的位姿,其中各个关节转角的范围为已知量,连杆坐标系如图2所示,ER50机器人的D-H参数如表1所示。
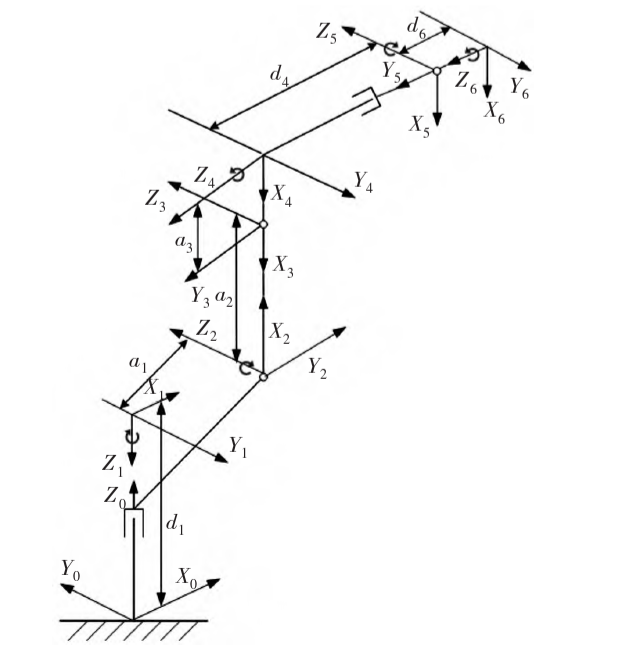
图2 连杆坐标系图
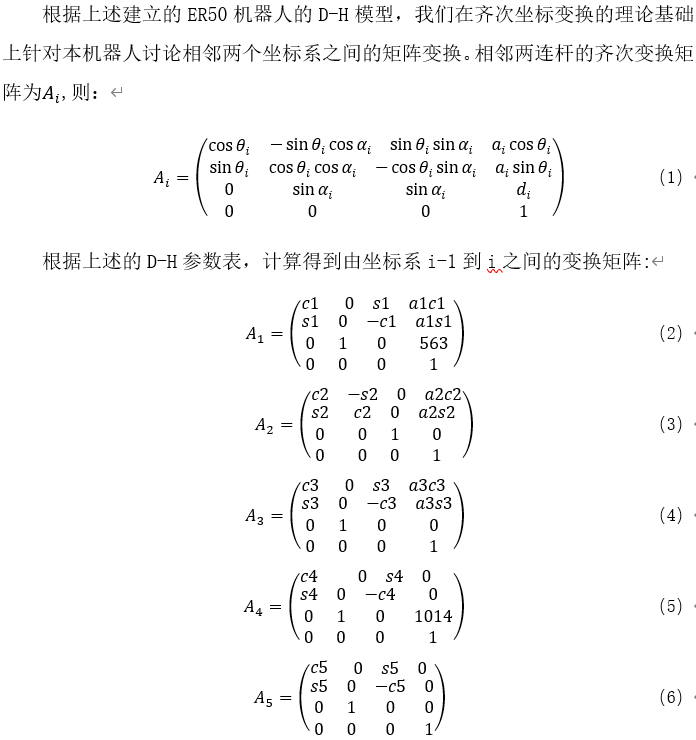
其中,si=sinθi;ci=cosθi;sij=sin(θi+θj);cij=cos(θi+θj).
在齐次变换矩阵T中,![]() 组合起来的实际物理意义便是末端执行器相对于基座坐标系的位置矢量P,接下来我们着重探讨这一表达式。由六个关节转角连续变化,带入到位置矢量P中,得到末端执行器的一条运动轨迹图,如图3所示。
组合起来的实际物理意义便是末端执行器相对于基座坐标系的位置矢量P,接下来我们着重探讨这一表达式。由六个关节转角连续变化,带入到位置矢量P中,得到末端执行器的一条运动轨迹图,如图3所示。
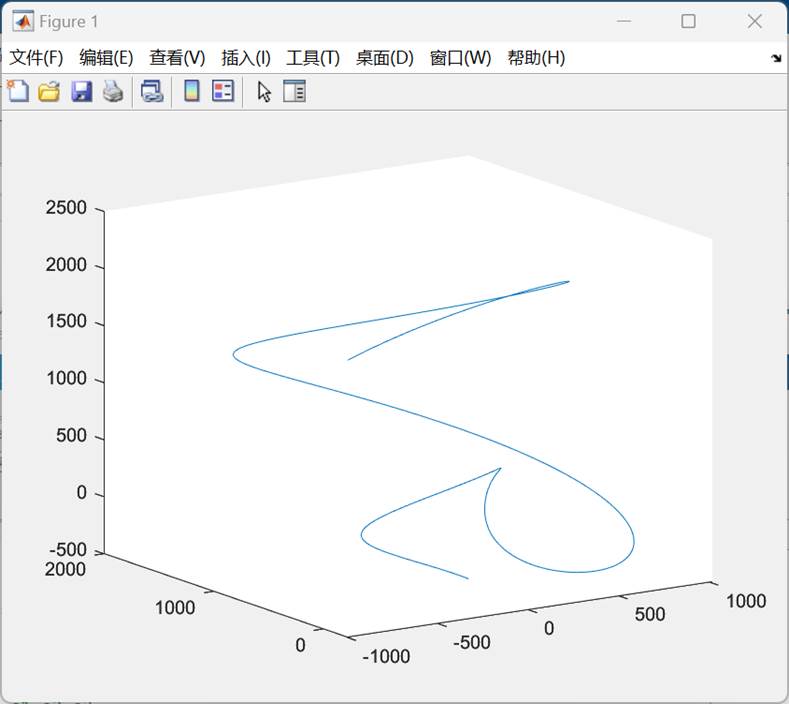
图3 末端执行器运动轨迹图
3.可靠性数学模型的建立
随机变量:![]() ,
,![]() ,随机变量统一表示为:
,随机变量统一表示为:![]() 。
。
那么实际位置:
![]() (9)
(9)
目标位置
![]() (10)
(10)
末端误差
![]() (11)
(11)
假设允许值为r,
则定位精度
![]() (12)
(12)
计算得出可靠度
![]() . (13)
. (13)
至此可靠性的数学模型建立完成。
二、下一步工作计划
目前对于机器人末端执行器的位姿图像输出尚不满意,下一步需要继续调整,输出令人满意的位姿图像曲线。除此之外,继续学习可靠性算法,借助Matlab软件实现对本模型的可靠性计算,输出可靠性分析结果。分析完成后,便着手毕业论文的撰写以及外文资料的翻译。

问题一:你所理解的运动可靠性是什么样的概念?
回答:为了实现作业需求,我们会给出末端执行器的理论位置,这是最为理想的位置;然而实际中会受到诸如生产误差、关节磨损等因素的影响,导致实际的末端执行器的位置会与理论位置产生偏差,但是如果这个偏差处于我们的可接受的范围内,那么就可以认为此时这个机器人是可靠的。
问题二:可靠性算法可不是非常容易的事情。
回答:这对我来说的确是一个挑战,目前我对它的了解也只处于皮毛的阶段。但愿我后续的学习、分析过程能够顺利。

毕业设计还是一段比较奇妙的旅程,我不断地学习、不断地思考、不断地出错,我需要拿出的是对于自己来说完全新颖的东西。我去观察六轴机器人的运动过程,观察输入到其中的控制程序长什么样子;我去学习正运动学的分析过程,去学习D-H法则是个什么东西,搞明白了坐标系的变换过程。这无疑是简单的,但我又能通过这些一个一个的简单的过程,去完成我的毕业设计任务,去开拓一个全新的能力,不可谓不奇妙。苔花如米小,也学牡丹开。我瞻仰巨人群星的杰作:严谨而又巧妙的运动学建模的方法、极具逻辑性的可靠性分析算法,还有帮助我完成复杂的运算的Matlab软件,他们无时不在彰显我的渺小。撷其中几缕,运用到我的题目上来,这便是我正在做的,也是我尝试做好的,我为此感到兴奋。
十分感谢俞水老师长期以来对我的指点,他教会我用什么样的眼光去看待看似很复杂的系统,他教我如何去分解结构、如何一步步地达到想要的结果,此间种种细节、种种方法,皆令我大为受用。很幸运能够选到这样一个让我感兴趣的题目,很期待我交出的那份答卷。