
【机情无限 精彩毕设】机械2025届毕业设计(论文)中期检查优秀案例分享第二十七期——下肢康复外骨骼人机系统的设计与评估

学生姓名:陈冠宇
班 级:工程2021-01班
指导教师:李怀仙
毕设题目:下肢康复外骨骼人机系统的设计与评估


一、概况
1.选题意义
下肢康复外骨骼评估系统的研究具有重要的理论价值和实践意义。随着人口老龄化加剧和脑卒中发病率上升,康复机器人技术成为解决医疗资源短缺的关键突破口。然而当前外骨骼康复训练缺乏客观、量化的评估标准,严重制约了个性化康复方案的制定和治疗效果的精准评价。本研究通过建立多模态融合的智能评估体系,不仅填补了康复外骨骼性能评价的理论空白,更为临床康复提供了可量化的决策依据。其创新性评估指标和嵌入式系统设计,既提升了康复训练的精准性和安全性,又为后续智能康复设备的研发奠定了技术基础。研究成果将直接推动康复医学的数字化进程,对改善患者生活质量、降低社会医疗负担具有重要意义。
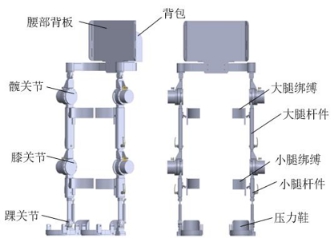
图1 已有外骨骼设计
2.任务分解
本论文围绕“下肢康复外骨骼人机系统康复效能评估”这一核心目标,整体采用“指标选择-系统搭建-数据处理-实验验证”四阶段的研究框架:
(1)指标选择:根据现有的国际标准,如ISO 13482和IEC 60601-1,同时结合下肢外骨骼机器人的一些功能特征,目前广泛采用的评价指标主要分为动力辅助、负荷性能、环境适应性、稳定性和舒适性这五类。在保证下肢康复外骨骼评估指标有意义并且有代表性的基础上,建立多维度的评估指标体系,本文选择了“表面肌电信号”“知觉关节活动范围”“运动对称性”这三个参数指标进行评价。
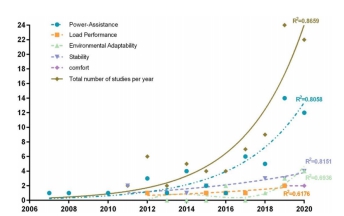
图2 目前评估指标分类
(2)系统搭建:本文创新性地提出并构建了基于BP神经网络的下肢康复外骨骼的评估系统模型。该模型通过确定的下肢康复评价指标参数,实现运动功能参数的量化评分,并引入基于神经网络的深度学习算法,最终形成偏差小、准确性高的动态评估算法。
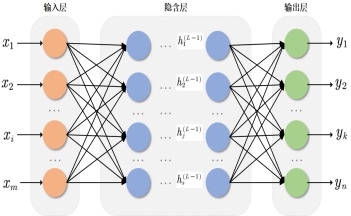
图3 BP神经网络结构
(3)数据处理:基于本文所采用的下肢康复外骨骼附属的多源传感器数据采集系统,通过获取相应的周期、角度、速度、电生理信号等数据,同时应用相应的数据分析方法,对不同受试者的指标进行标准化处理。例如,收集到的表面肌电信号sEMG,通过Noraxon MR3和MatLab软件经行滤波、平滑过滤、归一化等操作,最终获得直观呈现的数据形式。
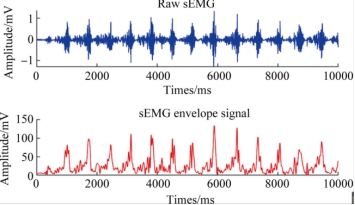
图4 表面肌电信号处理示意
(4)实验验证:实验验证的目的是应用选取和建立的下肢康复外骨骼机器人应用评估指标,设计相应的实验方案以实现对下肢康复外骨骼的运动功能训练的应用评估,使相关研究人员了解外骨骼机器人在康复训练方面的优点及存在的问题,为下肢康复外骨骼机器人的产品功能改进、系统性能完善临床实验提供参考数据和资料。
二、已完成工作
1.理论研究
基于ISO 13482机器人国际安全标准,同时根据下肢外骨骼机器人现有的各种性能测试,目前下肢外骨骼机器人由研究人员进行的主要是动力性能辅助、负载性能、环境适应性、稳定性和舒适度这五方面的实验测试。在此基础上,一般通过动力学、运动学、时空参数、肌力和代谢值、肌电信号等参数指标来评估下肢外骨骼的功能效果。由于如今还没有被普遍接受的测试方法和指标,本文的研究旨在研究统一客观的定量检测方法和指标,建立及时反馈的评估系统。
2.评估标准体系的建立
从上述五个方面出发,完成了多维评估指标体系,确立3项核心评价指标:
(1)下肢表面肌电信号sEMG:肌电图主要讨论的是骨骼肌的运动过程,在肌肉受到刺激的同时,会产生一连串的动作电位。sEMG就是在相应肌肉表面通过电极,从而记录下一连串的MUAP电信号,透过肌电图便可以得知周围神经、神经元、神经肌肉接头及肌肉本身的功能状态。
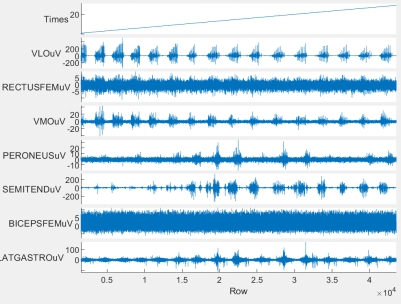
图5 sEMG处理流程
(2)知觉关节活动范围RMP:结合日本康复医学会定义的关节活动度ROM和我国常用的Brunnstrom偏瘫运动功能评价方法,定义了知觉关节活动范围RMP——患者进行关节活动时所能感受到的外界活动的关节范围,作为评价标准之一。具体阐释为,在外骨骼设备上装置相应的角度传感器测量关节角度,选择髋、膝、踝关节进行伸展和屈曲运动时矢状面内的关节活动度占整个关节角度的百分比作为评价指标。
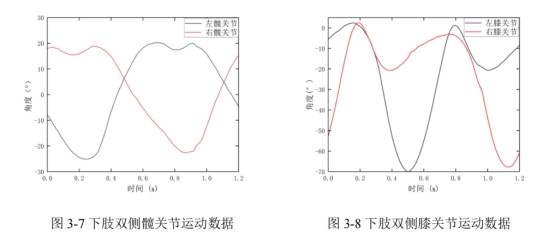
图6 髋关节活动角度
(2)运动对称性IDps:选取的步态对称性计算指标为时相对称性指数以及基于步长、跨步长的Fitts定律综合对称性指标。步态时相对称性指标是通过计算步态周期的相位时间,来对行走状态下人体左右两侧腿的步态对称性进行评估。
3.评估算法的实现
选择基于BP神经网络机器学习的康复评估模型,通过神经网络输出的误差值,反向逐层调整各层之间的连接权重参数,从而实现对复杂非线性关系的建模,具有较强的泛化性能和非线性映射能力。所选择搭建的神经网络模型主要由1个输入层,4个隐藏层和1个输出层构成,其中输入层包含5个神经元,4个隐藏层分别包含40,20,5个神经元。以随机梯度下降作为该下肢康复评估模型的寻优方法,同时用ReLU函数作为神经网络的激活函数,使用均方误差作为损失函数,并将训练步数设置为800步。
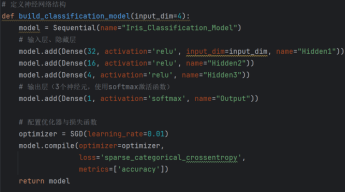
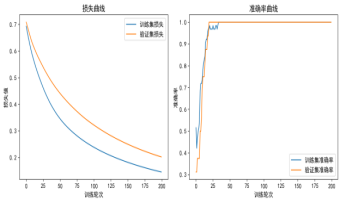
图8 部分代码截图 图9 预计呈现效果
4.数据预处理方法的掌握
根据上述提出的康复评价指标,“知觉关节活动范围”和“运动对称性”只需通过简单标准化的公式对相关数据进行处理变换,而对外骨骼传感系统获得的表面肌电图需要经过复杂的归一化处理分析。针对外骨骼运动场景中的sEMG信号特点,会出现运动伪影、工频干扰、基线漂移等噪声源,需要多项预处理流程。
三、下一步工作计划
1.数据采集
提前设计好标准化的数据采集流程,如包含平地/斜坡/突发干扰场景的测试环境,形成明确的测试项目。在前期理论研究的基础上,选择与合作医院协调让运动功能障碍患者/偏瘫患者参与康复评估或者直接在实验室囊括健康受试者参与完成,完成至少15例的数据收集。
2.评估模型优化与测试
对现有的神经网络模型进行改善,在提高对新数据的泛化能力的同时,适当剪枝避免造成过拟合的现象。将整体评估模型完成后,导入已测试采集到的下肢康复外骨骼数据集,对其进行交叉验证,形成及时反馈的评估系统。
3.实验验证与对比
将上述受试者的情况让专业医师进行评估,可采用Brunnstrom偏瘫运动功能评价方法或是BFMDRS量表对其进行相应评分,将机器学习所得的结果与专业医师评分结果进行差异比较,形成对比曲线。
4.撰写论文
基于绘制的技术路线图,撰写逻辑通顺的论文终稿,并且对其进行整体降重、优化,并制作答辩PPT。

问题一:目前进展还行,数据获取来源打算怎么做?
回答:预计在下周与李老师去合作医院,使用样机进行测试并获取数据。
问题二:目前没有数据的话,评估的偏差以及函数图像是从哪来的?
回答:所展示的偏差比较图像,是根据系统自带的样本数据集进行模拟导入,并进行简单的评估测试,从而形成这一实例图形。

通过本次毕业论文研究,我对下肢康复外骨骼评估系统有了更深入的认识和理解。在课题研究过程中,我深刻体会到多学科交叉融合的重要性,康复机器人技术涉及机械、电子、计算机、医学等多个领域的知识,需要综合运用多种技术手段才能解决实际问题。在构建评估指标体系时,我学会了如何从临床需求出发,将抽象的医学概念转化为可量化的工程参数;在开发数据处理算法时,掌握了如何平衡算法精度与实时性的关系;在进行实验验证时,理解了严谨的科学态度和规范的实验流程对研究结果可靠性的关键影响。
这次研究经历让我受益匪浅。首先,提升了我的工程实践能力,从理论分析到系统实现,从算法设计到实验验证,完整经历了科研项目的全过程。其次,培养了解决复杂问题的能力,面对肌电信号干扰、数据同步误差等技术难题时,我学会了通过文献调研、专家咨询和实验验证相结合的方式寻找最优解决方案。最重要的是,这次研究让我认识到科技创新必须以服务社会为宗旨,康复外骨骼技术的发展最终是为了改善患者的生活质量,这让我对工程师的社会责任有了更深刻的理解。这些收获将对我未来的工作和学习产生深远影响。