
【机情无限 精彩毕设】机械2025届毕业设计(论文)中期检查优秀案例分享第三十四期——基于PIX开发板的四轴无人机的设计

学生姓名:屈率帅
班 级:交控2021-01班
指导教师:曾祥光
毕设题目:基于PIX开发板的四轴无人机的设计


一、概况
随着科技的飞速发展,无人机技术已经从最初的军事领域应用逐步扩展到民用领域,尤其是在农业、物流、航拍、环境监测、安防等多个行业的应用取得了显著进展。四轴无人机(也叫四旋翼无人机)由于其结构简单、成本低廉、飞行稳定性较强且操作灵活,成为了众多无人机产品中的主流选择。
PIX开发板(如Pixhawk飞行控制器)是一种功能强大、开源可编程的飞行控制平台,广泛应用于现代无人机的设计与开发。得益于其强大的计算能力、开放的硬件架构和丰富的软件支持,PIX开发板为无人机设计提供了更高的自由度和灵活性,使得无人机开发者能够在硬件和软件上进行个性化定制,以实现更精确、更高效的控制和飞行。
当前,无人机技术的快速发展面临的主要挑战包括:飞行控制系统的智能化、飞行稳定性的优化、传感器集成与算法开发的复杂性等。因此,如何通过高效、可靠的飞行控制平台来提高四轴无人机的整体性能,成为无人机研发中的一个关键问题。
在此背景下,基于PIX开发板的四轴无人机设计,旨在提供一个高效、稳定、可扩展的飞行平台,为各类应用提供技术支持,同时推动无人机技术的进一步发展。
二.任务分解
1.确定四轴无人机的整体构成;
2.可行性参数以及结构设计;
3.元器件的选型;
4.硬件电路设计;
5.软件设计;
6.调试与试飞。
三、已完成工作
1.PCB电路板设计与制作:
在前期硬件设计阶段,基于项目对飞控系统的电气连接需求,设计了适用于开发板平台的定制PCB板。使用EDA进行电路图设计与布线,充分考虑了各模块的布局合理性、电源供电稳定性、信号传输路径优化以及抗干扰能力。在完成PCB设计后,将其送厂打样,并完成了全部板件的元器件焊接和初步硬件连线工作。
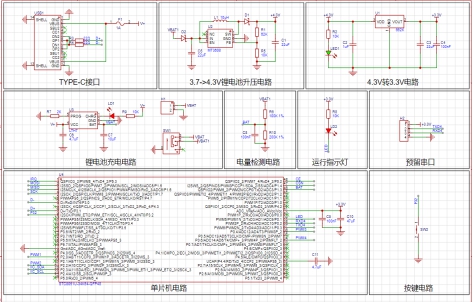
图3-1 部分原理图设计

图3-2 PCB硬件电路设计
2.焊接与初步硬件调试:
对设计好的PCB板进行了实际焊接操作,包括元器件贴装、电源模块焊接、接口排针的连接等。在焊接过程中,重点保证了核心元器件(如MPU6050、气压计等)焊点的牢固与信号完整性,并对部分出现虚焊、假焊等问题的连接进行了排查与返修。目前,主要模块已成功上电并能够正常识别信号,硬件整体运行情况良好。

图3-3 硬件焊接与调试
3.飞行控制系统部分编程:
在飞行控制软件方面,已完成了部分飞控主程序的编写,包括飞控主循环框架搭建、传感器数据读取接口实现、PWM输出通道初始化等核心内容。在姿态控制算法方面,初步完成了基于PID(比例-积分-微分)控制算法的基础飞行姿态控制逻辑编程。PID算法用于调节无人机的姿态稳定性,当前主要实现了对俯仰与横滚两个方向的角度控制,算法尚处于初步测试与参数调试阶段。

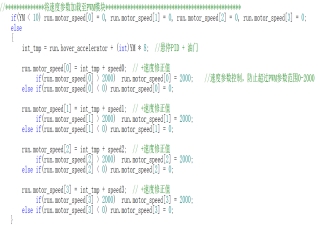
图3-4 部分PID软件参数
4.系统模块集成测试准备:
完成了部分子模块之间的接口验证,包括飞控系统、姿态传感器(MPU6050)等模块的通讯测试。硬件电路在电压稳定性和信号连通性方面已经具备集成基础,正在准备后续的软件调试与整体系统联调。
四、下一步工作计划
1.电机与电池关键参数测试与数据采集:
为确保飞行系统的性能达标,计划对电机的推力输出、转速响应曲线以及工作电流等进行实验测试。同时,对所选电池的放电倍率、实际电压曲线与负载能力进行详细测试记录,结合不同负载工况评估飞行时长与功率冗余。这些实验数据将为后续系统优化与电源管理逻辑提供可靠依据。
2.实验数据的验证与参数校正:
将采集的实验数据与理论设计参数进行比对分析,采用误差评估与回归计算等方法对模型进行修正和调参。特别是在PID控制器参数设置、电调响应延迟补偿、陀螺仪漂移处理等方面,依据实际反馈优化算法性能,增强系统稳定性与响应速度。
3.飞控系统C语言编程的持续开发:
将在已完成的PID姿态控制算法基础上,进一步完善飞行控制程序,补充高度控制、定点悬停、姿态自动校正等功能模块。
4.无人机初步飞行测试的准备:
在硬件与软件开发达到可联调程度后,将安排进行室内悬停测试与低空试飞验证。通过试飞收集传感器数据与飞行姿态参数,分析飞行稳定性,进一步调整飞控参数并完善控制逻辑。
5.飞行日志与调试记录系统的搭建:
为便于后续的调试与数据分析,将设计简易的飞行日志系统,对飞行时间、电机功率、PID输出、等信息进行记录和可视化展示,提升系统调试效率。

问题一:在无线收发模块的选择上,为什么选择了NRF24L01模块,而不是其他如蓝牙模块或者其他模块?
回答:实际上,无线收发模块除了蓝牙和NRF24L01以外,还有如WIFI、Zigbee、Lora等无线收发模块,选择NRF24L01的原因主要是因为该模块式点对点通信。同时为了保证飞行的稳定性,该点对点通信可以有效的防止干扰现象, 从而保证飞行过程中不出现失衡的现象。而其他如蓝牙模块就容易收到干扰。
问题二:在你设计的硬件电路部分,为什么要先升压再降压?
回答:在锂电池供电时,由于无人机的空心杯电机所需的电流较大,因此电池放电十分迅速,这时电源的电压就很容易波动,导致供电不稳的情况。因此我用MT3608芯片控制升压,用662K稳压芯片控制降压来将电压先升后降,从而保证电压的稳定,继而使无人机能够正常工作运转。

在本次四轴无人机项目的设计与开发过程中,我系统地完成了从整体构架设计到硬件电路实现的关键步骤,并对无线通信模块选型、电源稳定性设计等核心问题进行了深入思考。
一、系统性工程思维的提升
1.任务分解能力
通过将项目划分为结构设计、元器件选型、硬件/软件开发、调试试飞等模块,我掌握了复杂项目的拆解方法。例如在硬件设计中,需同步考虑电机驱动、电源管理、通信模块的兼容性,这种多线程推进的经历让我认识到"分而治之"的重要性。
2.设计闭环意识
在确定无人机整体构成时,发现结构重量与电机推力参数需动态匹配。通过建立Excel参数关系表(如电池容量VS续航时间、桨叶尺寸VS升力),我学会了用数据驱动设计决策,避免后期返工。
二、经验教训总结
1.元器件采购陷阱
初期选择的空心杯电机标称推力为50g,实际测试仅达38g,导致重新选型延误。后续将通过"参数留余量+样品实测"双保险规避风险。
2.工具链协同问题
硬件设计时未考虑软件调试接口、没考虑到手工焊接时需要的空间大小,最后导致无人机焊接过程中连锡虚焊,从而耽误了调试时间。未来将建立《硬件-软件接口检查表》规范设计流程。
三、收获与体会
本次实践让我体会到,工程开发是"理论-实践-迭代"的循环过程。例如电源设计时,电压纹波通过示波器波形变得直观;而飞行器平衡调试则让我对《自动控制原理》的PID参数整定有了具象认知。这些跨学科知识的融合应用,正是工程创新的魅力所在。这次实践也让我真正的意识到了毕业设计的重要性,在后续设计过程中我将继续贯彻认真勤奋的精神,将毕业设计做好做完美,给我的大学生活交一个满意的答卷。