
【机情无限 精彩毕设】机械2026届毕业设计(论文)中期检查优秀案例分享第一期——仿动物脊柱肌肉骨骼结构的软体机械臂设计及其力学特性研究

学生姓名:陈雨轩
班 级:机械(茅机)2022-01班
指导教师:王韬
毕设题目:仿动物脊柱肌肉骨骼结构的软体机械臂设计及其力学特性研究


一、概况
1.研究背景与意义
传统刚性机器人在结构化环境中精度高、负载强,但柔顺性差、安全性不足,难以适应非结构化、人机共存等复杂场景。纯软体机器人虽具备良好的安全性与适应性,却普遍存在负载能力低、运动精度差、控制困难等问题。受动物脊柱“刚性椎骨—柔性椎间盘—肌肉驱动”构型启发,本研究提出一种刚柔混合的仿生机械臂设计方案,旨在兼顾柔顺性与承载能力,拓展机器人在人机交互、脆弱物体操作、非结构化场景等领域的应用潜力。
2.任务分解
(1) 仿生结构分析与概念设计:解析脊柱运动学原理,提出由刚性关节(仿椎骨)、软体间隔(仿椎间盘)和嵌入式驱动器(仿肌肉)构成的模块化机械臂模型。
(2) 结构设计与三维建模:完成刚性骨架、软体间隔及气动/腱绳驱动器的几何与材料设计。
(3) 样机制备与控制系统集成:采用3D打印与模具铸造工艺制作样机,集成气泵、电磁阀、控制器(Arduino UNO R3)及供电系统。
(4) 力学特性测试与分析:搭建实验平台,测试弯曲角度、负载能力、运动精度及静态刚度,分析结构参数对性能的影响。
(5) 功能演示与验证:通过S形弯曲、抓取等动作演示机械臂的多自由度运动与交互能力。
3.技术路线
每个关节模块由3个互成120°的气动仿生肌肉驱动,实现俯仰、偏航等多向弯曲。
两个模块串联形成最多6自由度机械臂,末端集成软体机械爪(气动囊体结构)。
采用摇杆手柄实现人机交互,通过PWM信号控制气泵和电磁阀开关,连续调节气压与运动速度。
4.预期成果
一套仿脊柱结构的刚柔混合机械臂样机。
系统的力学特性实验数据与分析结论。
验证该仿生构型在兼顾柔顺性与负载能力方面的有效性,为刚柔混合机器人设计提供新思路与实践案例。
二、已完成工作
1.已明确仿生机械臂结构设计的总体设计方案并将主体部分出图:
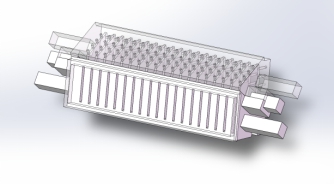
(1)完成仿生机械臂的六腔双段整体布局设计
- 将两个相同的仿生关节模块轴向串联,形成理论最多6自由度的灵巧机械臂。
- 采用“模块化串联”构型,仿生脊柱多节段运动原理。
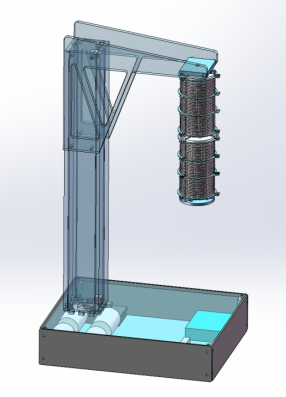
图1 机械臂主体结构
其中机械臂中各个仿生肌肉的配合连接设计——卡扣设计:
- 仿生肌肉通过卡缝隙方式固定,采用分体式卡扣(非整体)便于安装。
- 分体间使用销钉连接而非螺栓,避免空间干涉。
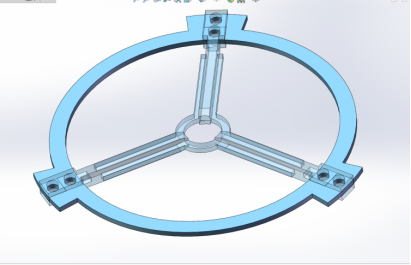
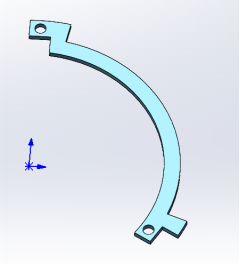
图2 卡扣结构图
(2)单节段仿生关节设计
- 提出由3个互成120°的仿生肌肉构成基础驱动单元,可实现空间俯仰、偏航等多自由度连续弯曲。
- 每个肌肉采用硅胶弹性材料,通过模具注塑制成中空结构(气动网络/囊体)。
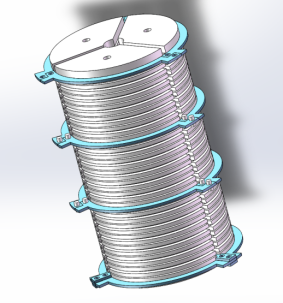
图3 卡扣与仿生肌肉装配图
(3)软体机械爪设计
- 设计无指化、连续体结构的软体末端执行器,由多气室囊体构成。
- 通过对不同气室选择性充放气,实现“拥抱”或“包络”式抓取,适用于不规则、易损物体。
成果:机械臂主体部分设计图纸已十分完善,后续将安装图纸加工组装机械臂。
2.已确认仿生肌肉制备工艺并进行了模具开发
(1)材料选择
- 选用液体硅胶A液与B液(等质量比混合,室温交联固化),具备良好流动性与弹性。
(2)分步模具设计
第一套模具用于成型“片片”结构,该结构在后续工序中作为内嵌模板,用于在成品内部形成特定形状的空腔。第一套模具的设计图与实物图如图所示,所制得的“片片”如图所示。
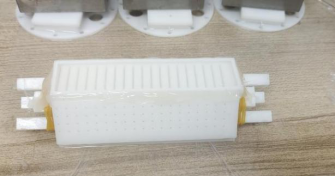

第二套模具为仿生肌肉的主体成型模具,其设计图与实物图如图所示。在正式浇筑前,将第一套模具制得的“片片”表面均匀涂覆凡士林作为隔离层,随后将其按预定位置置于第二套模具型腔内。凡士林可有效防止“片片”与后续注入的硅胶材料发生化学粘连,同时确保二者在固化后保持界面分离状态。
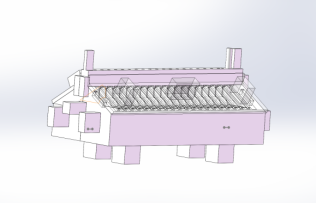
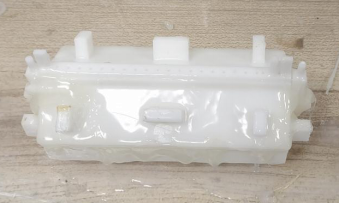
图5 第二套模具
完成定位后,将按等质量比混合均匀的液体硅胶A液与B液缓慢注入第二套模具中,使其充分填充型腔并包裹“片片”。待硅胶完全交联固化后脱模,此时“片片”与主体硅胶之间因凡士林隔离而互不粘连。当成品在驱动气压作用下发生拉伸变形时,“片片”所在区域因无法与主体结构协同膨胀,自然形成封闭的空腔结构,从而实现仿生肌肉的气动驱动功能。最终制得的仿生肌肉成品如图所示:

图6 仿生肌肉成品
成果:截止到目前一共做出7个仿生肌肉(其中一个作为备件)
3.电控系统搭建与初步验证
(1) 控制器与供电
- 选用Arduino UNO R3作为主控制器。
- 采用大容量锂电池组为气泵、控制器、执行模块独立供电,支持样机脱离市电运行。
(2)气动驱动与功率接口
- 微型气泵提供压缩空气,多位电磁阀控制流向通断。
- 因电磁阀驱动电流较大,选用L298N电机驱动模块作为功率接口桥,实现低压逻辑信号对大电流负载的驱动。
(3)人机交互与控制逻辑
- 设计双轴模拟摇杆手柄作为交互界面,主控板实时采集摇杆电压信号。
- 将摇杆偏移量映射为PWM信号,连续调节电磁阀开度,控制气压大小,实现弯曲角度与速度的平滑调节。
(4)系统集成流程
- 确立了“指令输入→模式判断→信号分配→功率驱动→协同执行”的闭环控制逻辑。
(5) 初步验证成果
- 已完成遥控器控制点灯实验,成功实现灯亮/灭及亮度变化,验证了遥控通讯功能。
- 正在开展单个仿生肌肉的控制实验,目前发现电磁阀疑似漏气严重,正在排查。

图7 遥控通讯功能
三、下一步工作计划
针对当前存在的问题与整体研究目标,下一阶段的工作将围绕样机集成、控制验证与功能测试三个方面有序推进,具体安排如下:
1.完成机械臂主体结构的装配与静态性能测试
依据已完成的设计图纸,利用3D打印与机械加工手段完成刚性结构件的制备,结合已制备的仿生肌肉,完成机械臂主体部分的物理装配。
装配过程中重点关注仿生肌肉与卡扣结构的固定可靠性、各关节模块的对中性与运动干涉情况,确保机械臂的几何精度与运动自由度符合设计预期。
在完成装配后,开展静态性能初步测试,包括各关节模块在无负载条件下的运动范围验证、气密性检查以及基础驱动功能的可行性评估。
2.完善软体机械爪的结构设计与样件制备
针对软体机械爪的多气室囊体结构,进一步优化其几何参数与腔体布局,以提高对不同形状物体的自适应包络能力。
参照仿生肌肉的成型工艺,完成机械爪的模具设计与样件制备,并测试其在不同气压条件下的抓取形态与夹持力。
将机械爪与机械臂末端进行刚性连接与气路集成,确保其能够与机械臂本体协同工作。
3.推进电控系统开发,实现单关节及多通道协同控制
在现有遥控器通讯验证的基础上,开展单个仿生肌肉的闭环控制实验:建立气压控制模型,通过PWM信号调节电磁阀开度,实现对仿生肌肉弯曲角度与速度的精确控制。
待单关节控制稳定后,将控制策略扩展至多个仿生肌肉,模拟4路气道的协同控制,完成对机械臂一个关节模块(3个仿生肌肉)的驱动与运动控制。
开发摇杆手柄与多路电磁阀的映射逻辑,实现俯仰、偏航等多自由度运动的连续操作。
4.开展系统联调与功能验证
待机械臂主体装配完成、电控系统调试到位后,进行系统级联调,验证“指令输入→信号处理→功率驱动→气动执行→机械运动”全链路的协调性。
规划典型运动轨迹(如单关节弯曲、双关节联动、“S”形曲线运动),测试机械臂的运动范围、响应速度与控制精度。
若进度允许,结合软体机械爪开展抓取-搬运的初步功能演示,验证整机在柔顺性与负载能力之间的平衡效果。

问题一:软体机械臂的应用场景你是打算设置在哪里呢?
回答:在科普教育场景中,机械臂作为直观展示机器人运动学、控制原理及自动化技术的重要教具,其交互安全性是首要考量因素。传统刚性机械臂多由金属结构件与高减速比关节构成,本体质量大、表面硬度高,在快速运动或程序误触发时具有较大的惯性冲击力。对于安全意识尚未完全建立、行为可预测性较低的儿童群体而言,即便设置虚拟围栏或急停装置,刚性臂在碰撞瞬间仍存在造成挤压伤、撞击伤的风险,这直接限制了儿童近距离观察、触摸乃至参与编程引导的深度体验。软体机械臂显然在这方面具有巨大的优势。
问题二:软体机械臂六个仿生肌肉的驱动方式可以再详细讲讲吗?
回答:本机械臂包含两个串联的仿生关节模块,每个模块由三根互成120°圆周布置的气动仿生肌肉驱动,共计六根独立肌肉。驱动方式基于气动人工肌肉原理:每根肌肉为硅胶中空囊体,充气时轴向收缩产生拉力,放气时弹性恢复。
控制策略采用差动驱动。单个关节模块内,通过独立调节三根肌肉的充气压力(由PWM信号控制泵电机转速),可合成任意方向的弯矩,实现俯仰与偏航两自由度连续弯曲。两个模块串联后形成最多6自由度空间运动能力,近端模块控制大范围指向,远端模块调节末端精细姿态。

通过本阶段的研究工作,在理论认知、工程实践与问题解决能力等方面均获得了较为系统的锻炼。
在理论层面,深入理解了动物脊柱“刚性椎骨—柔性椎间盘—肌肉驱动”的运动学原理及其向机器人构型的映射方法。通过对比刚性工业臂与纯软体机器人的优缺点,明确了刚柔混合结构的价值所在,并掌握了模块化关节、三肌肉差动驱动等仿生设计的关键思路。
在设计与制造层面,完成了机械臂刚性骨架、仿生肌肉及软体机械爪的三维建模与工程出图。尤其是在仿生肌肉制备过程中,从材料配比(硅胶A/B液等质量混合)、真空脱泡,到分步模具设计与凡士林隔离工艺,反复试验后成功制作出7个具有封闭气腔的肌肉样件。这一过程使本人熟悉了软体材料的成型工艺链,也深刻体会到模具精度、脱模剂使用及固化环境对成品质量的影响。
在电控系统搭建方面,以Arduino UNO R3为核心,集成了气泵、电磁阀、L298N驱动模块及摇杆手柄,建立了从信号采集到PWM输出的完整控制链路。通过点灯实验验证了遥控通讯功能,并初步开展了单个仿生肌肉的驱动测试。在此过程中,遇到了电磁阀漏气、信号干扰、功率不匹配等工程问题,通过查阅资料、逐一排查与更换器件,逐步形成了规范化的故障定位与迭代优化意识。
此外,本阶段工作还锻炼了项目进度的统筹能力。在图纸设计、样件制备、控制调试等任务并行推进的情况下,学会了合理分配时间并记录实验数据,为后续系统联调积累了宝贵经验。
总体而言,本课题将生物力学、机械设计与嵌入式控制有机融合,显著提升了本人的跨学科研究与动手实践能力,也为后续完成整机集成与功能验证奠定了扎实的基础。