
【机情无限 精彩毕设】机械2026届毕业设计(论文)中期检查优秀案例分享第三期——面向眼科微创手术的末端执行器设计与多传感测距反馈控制

学生姓名:李昀蔚
班 级:机械2022-03班
指导教师:向维
毕设题目:面向眼科微创手术的末端执行器设计与多传感测距反馈控制


一、概况
1.选题意义
(1)突破传统手术的操作瓶颈: 视网膜下注射等眼底疾病微创手术操作间隙极小(仅100-300μm),传统显微镜下徒手操作不可避免地会产生生理性震颤,且二维显微图像严重缺乏Z轴深度信息,极易导致针尖刺穿眼球壁等严重并发症 。
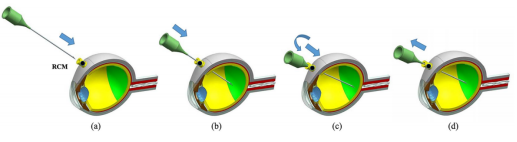
图1 眼部穿刺手术过程示意图
(2)提供高安全性的机器人辅助方案: 本课题提出并设计了一种末端执行器,利用多传感测距反馈控制技术隔离人手震颤,将微观尺度的穿刺与注射动作交由高精度机械结构半自动完成,确保进针深度绝对可控,大幅提升眼科微创手术的安全性与成功率 。
2.任务分解
(1)机械结构设计与加工:完成末端执行器总体及零部件(包含穿刺/注射直线模组、D405相机支架、双TOF传感器基座等)的三维建模设计,并完成部分3D打印与实物组装 。
(2)多传感信息采集网络构建:基于STM32微控制器,打通双TOF微型激光传感器的底层串口数据读取通道,实现毫米级近距离深度的实时感知与获取 。
(3)微动驱动与反馈控制链路搭建:结合步进驱动器与丝杆步进电机,将STM32的脉冲控制转化为精确的直线位移,实现基于距离反馈的穿刺与注射动作 。
二、已完成工作
1. 完成高集成度的末端执行器机械结构设计与搭载
针对眼科手术空间狭小的特点,利用SolidWorks完成了末端执行器的结构设计,创新性地采用双直线丝杆机构实现了穿刺进针与推药注射的动作解耦,并设计了专用的注射器夹紧装置以保证微动刚性 。目前已完成物理样机的组装,并将其成功装载于六轴机械臂末端 。
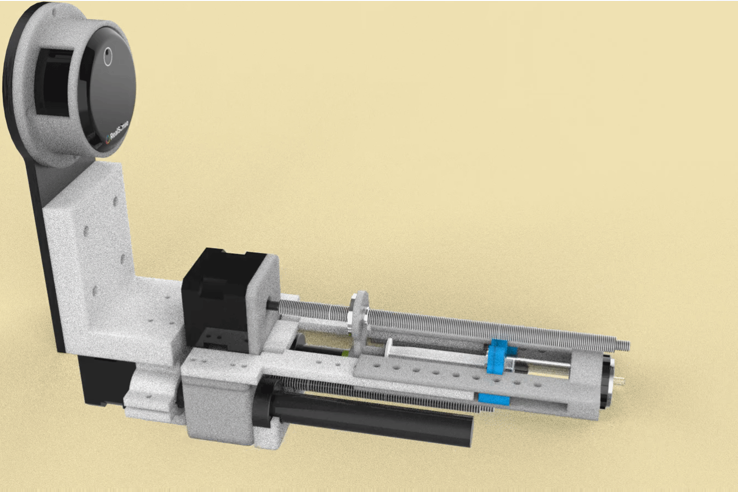
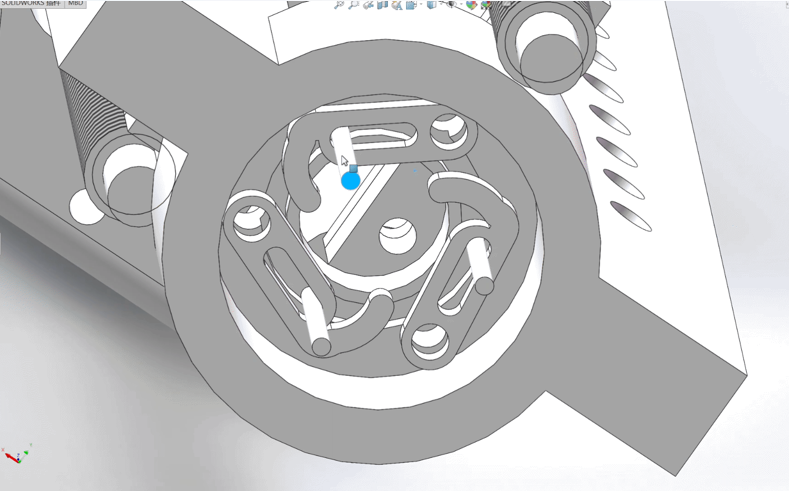
图2 末端执行器主体结构 图3 适配不同尺寸的注射器夹紧装置
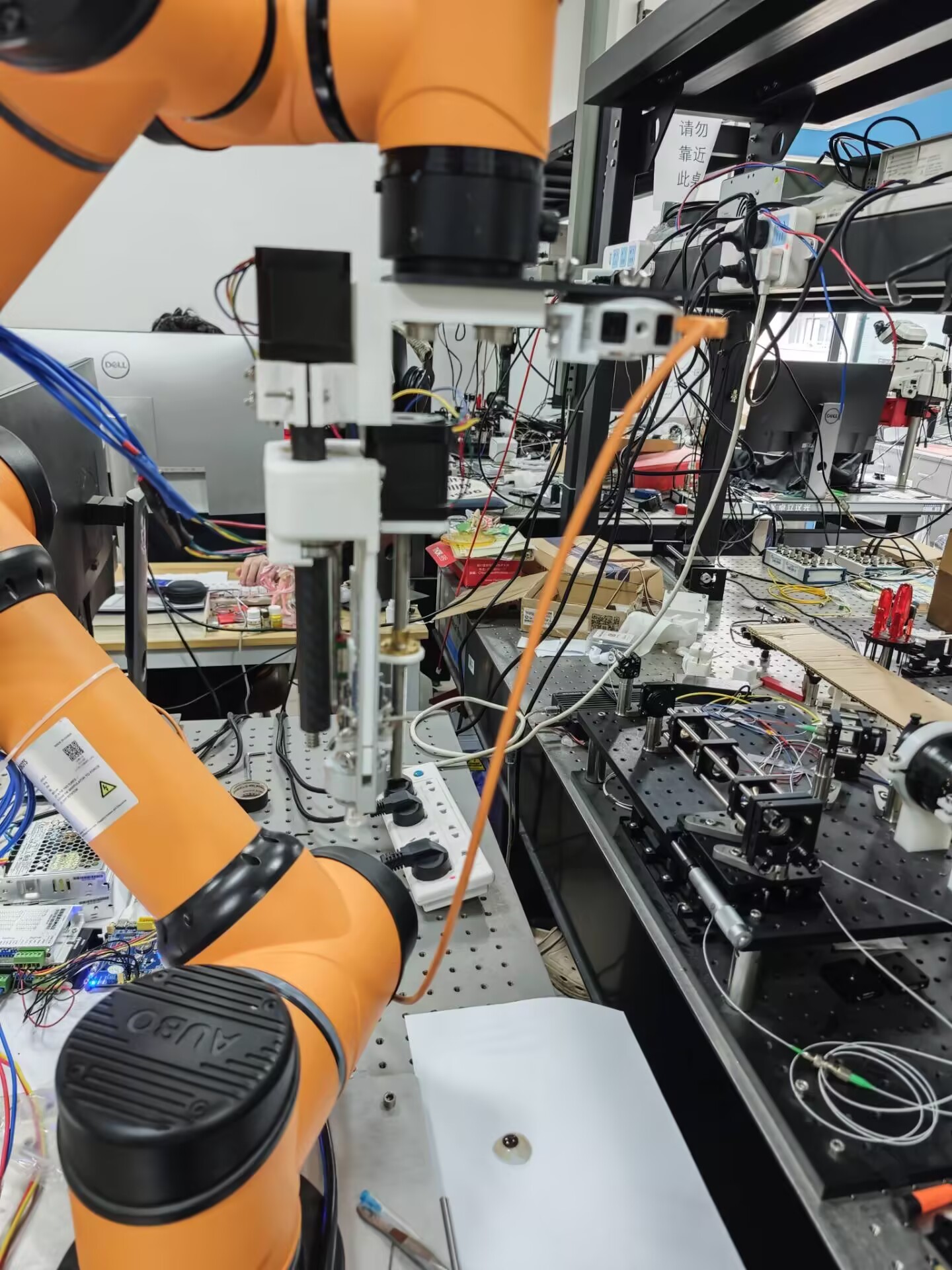
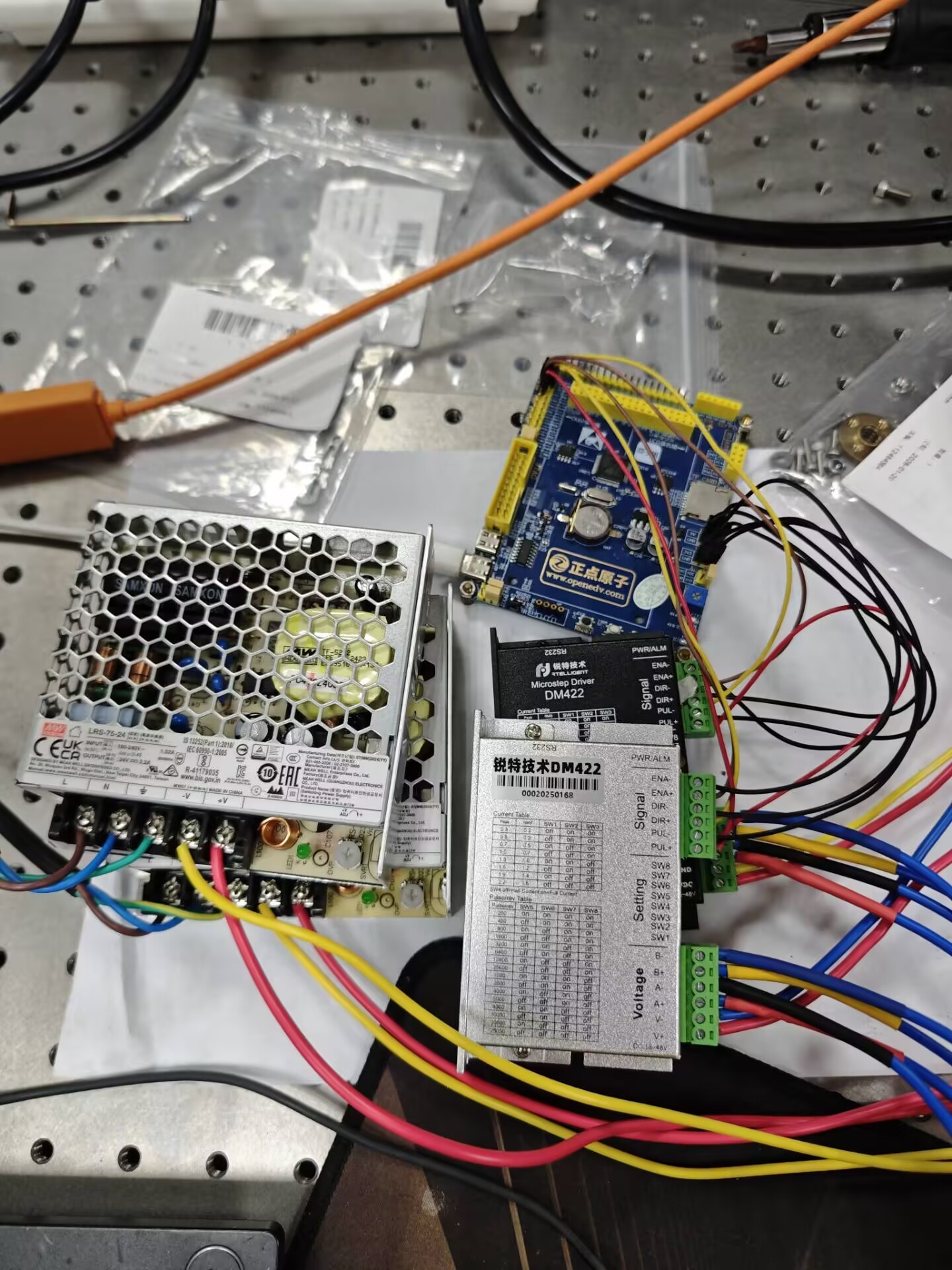
图4 末端执行器实物图 图5 接线实物图
2. 打通“传感感知-主控处理-微动执行”的核心数据流
基于STM32编写了双TOF传感器的串口通信解析协议,解决了多传感器数据冲突问题,实现了深度数据的稳定高频读取 。同时,完成了主控芯片与步进电机驱动器的硬件级信号对接,成功通过串口发送指令驱动电机转动,并在真实的物理挂载状态下验证了多模块协同工作的有效性 。
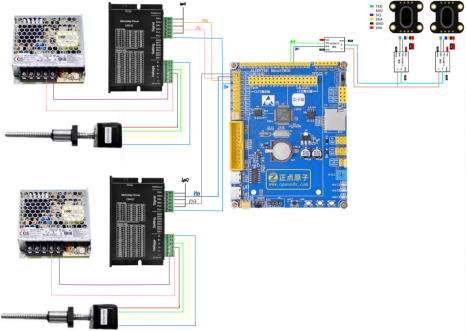
图6 stm32接线图
三、下一步工作计划
1. 视觉数据深度融合与系统规范化
梳理机械臂末端线束并绘制规范的系统硬件接线原理图;将RealSense D405相机的图像信息接入上位机,配合深度数据形成视觉引导结合距离反馈的完整操作视野 。
2. 开展核心穿刺实验与控制算法优化
搭建硅胶假眼模拟穿刺实验平台,记录真实阻力环境下的实际穿刺误差与系统响应时间 。根据实验数据,在STM32中引入加减速平滑控制算法,消除丝杆电机启停时的机械抖动,进一步提升末端的微动精度,并同步规范化撰写毕业论文 。

问题一: 目前系统主要依靠双TOF传感器进行空载状态下的距离反馈,在后续加入硅胶假眼的穿刺阻力后,如何保证末端微动执行的穿刺精度与平稳性?
回答: 针对真实穿刺阻力可能导致的机械微小震动与精度衰减,后续将重点优化STM32的电机控制算法。计划引入平滑加减速控制逻辑及步进电机细分控制。同时,通过搭建硅胶假眼核心实验平台,系统采集不同目标深度下的实际穿刺误差数据,依据实验反馈微调机械夹紧装置并补偿控制参数,从而消除阻力环境下的微小扰动。
问题二: 报告中提到下一步将结合RealSense D405深度相机,请问视觉信息与TOF距离数据在系统中的具体融合策略与分工是什么?
回答: 两者将在上位机系统中形成优势互补。目前已安装的D405相机获取的图像信息主要侧重于宏观视野引导与手术靶区的整体定位;而双TOF微型激光传感器由于其高频、高精度的特性,主要侧重于微观刺入深度的绝对距离把控。下一步将通过联合调试,将视觉画面与测距数据在上位机界面集成,构建“视觉引导定区+距离反馈定深”的完整操作视野,以双重保障手术的安全性。

1. 跨学科知识的深度融合与工程落地
本次毕业设计打通了机械结构设计(SolidWorks建模)、硬件电子(STM32与传感器接线调试)以及软件控制(串口通信与底层驱动逻辑)的技术壁垒。从图纸上的理论方案到物理样机的组装联调,让我深刻体会到了机电一体化系统设计的复杂性,并在解决“多传感器数据冲突”等实际工程问题的过程中,极大提升了自身的综合实践能力。
2. 严谨求实的科研态度与责任心
医疗机器人对精度的苛求,要求系统设计不能有丝毫妥协。本次中期汇报能够获评优秀案例,既是对我前一阶段扎实工作和系统性思维的认可,更是对后续核心实验的鞭策。这让我更加明确了工程研发的严谨性,在后续的算法平滑优化和假眼穿刺误差测试中,我将继续保持精益求精的态度,确保最终设计的执行器能够真正满足微创手术的高安全性要求。