
【机情无限 精彩毕设】机械2026届毕业设计(论文)中期检查优秀案例分享第五期——基于机器视觉的钢轨曲线半径识别方法研究

学生姓名:任金城
班 级:车辆2022-01班
指导教师:丁军君
毕设题目:基于机器视觉的钢轨曲线半径识别方法研究


一、概况
1.选题意义
(1)视觉检测铁路轨道曲率半径,并使得主动径向控制转向架得到实时监测轨道曲线半径的参数,通过得到的曲率半径参数来作出调整,以减小转弯时的横向力与不稳定性,对安全通过曲线,增加使用材料寿命等方面都有极大的工程意义。
(2)目前已知的方法投资成本高,利用机器视觉可以降低成本,采用机器视觉方法自动识别和判定轨道曲线同时具有实时性和复杂环境的识别性。
(3)机器视觉不受限于硬件设备,不受算力因素的限制,且机器视觉设备易安装,可以广泛应用,具有普适性。
2.任务分解
(1)整个机器视觉任务大致分为以下八个部分,主要包括:图像的预处理部分、逆透视变换、边缘检测、霍夫变换去直线、轨道线拟合、半径计算、距离测量与整体的实时检测算法。
(2)其中图像处理部分还包括转灰度、均衡化、天气判断模型建立、滤波处理等子任务,边缘检测包括图像的边缘提取,轨道线提取与感兴趣区域的选取等子任务。
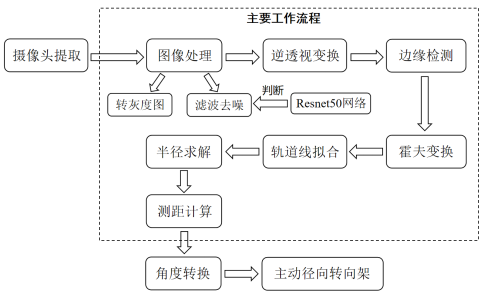
图1 任务流程图
二、已完成工作
1.完成车辆实验室环线与成都地铁9号线轨道线的图像采集工作。
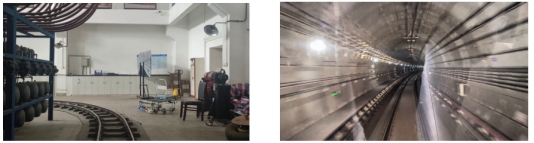
图2 采集图像
2.对于图像处理部分主要完成:转灰度图,图像均衡化,以及针对不同环境的滤波方法降噪,光照充足使用双边滤波,雨天等使用中值滤波增强降噪(天气环境的判断利用神经网络完成)。
3.完成天气判断模型Resnet50的搭建、训练与评价工作,并制作好数据集与分类,选择最优权重。
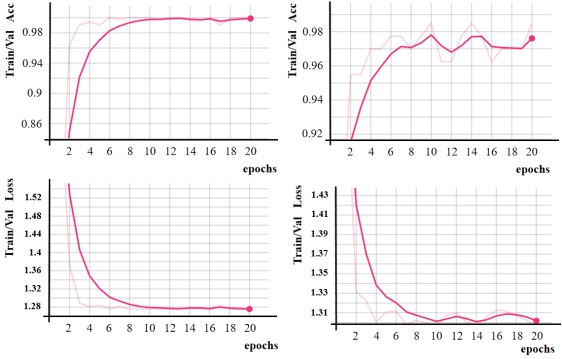
图3 模型的准确率与损失评价
4.对于逆透视变换主要完成:透视图的转化与调试,坐标的选取和生成平面图的坐标等。

图4 逆透视区域与效果
5.完成轨道线提取:主要包括边缘检测,轮廓的识别比较,最大轮廓线的提取代码等。
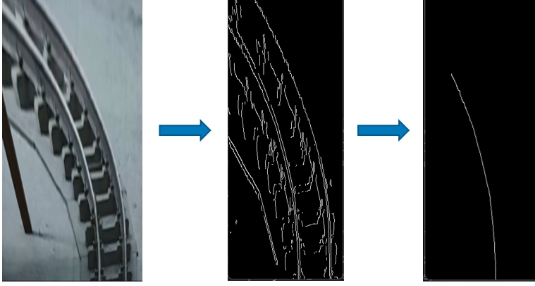
图5 轨道线提取流程
6.完成霍夫变换的直线曲线分段,得到的曲线再进行拟合算法,主要采取三次曲线模型,同时拟合方式适用最小二乘法拟合,计算出拟合方程。
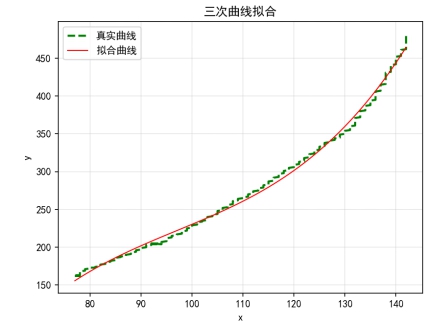
图6 拟合曲线图
7.完成半径计算与测距算法,半径计算利用曲率半径公式编写代码,调用完成计算,这里同时完成比例的转换,与逆透视图中环线轨距像素格数之比为转换比例 ,得到的为真实的曲率半径,测距算法主要完成三个部分的计算,包括计算点曲率y值、逆透视未选中区、相机垂直视角盲区,分别根据不同方式算得三部分。
8.完成实时监测算法,实现每5帧进行一次检测,并调用整个处理子函数。
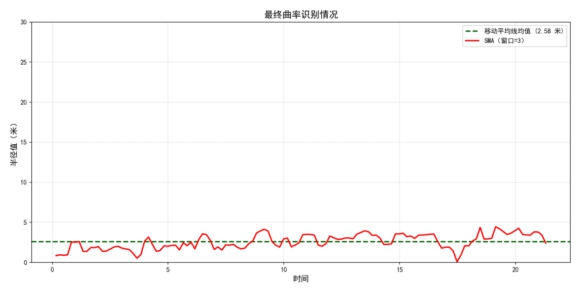
图7 实时检测结果
三、下一步工作计划
1.制定好输出结果半径的评价标准和指标,判定误差范围,做好算法的优化标准,从而进一步提高准确率。
2.调试已有的代码与参数,得到最接近真实数据的优化版本,包括半径值和距离值。
3.毕业设计论文的写作部分,当前已完成绪论与图像预处理这两章的内容,还有逆透视变换、边缘检测、曲线模型建立与计算、轨道线检测实验与总结展望等未完成,于是后续工作重点会放在写作上来完成。

问题一:ppt中有很多线条的一张图是什么?
回答:因为检测是视频方式实时进行的,该图为所有帧率识别出的半径的整体可视图,能看到大概的识别效果。
问题二:得到最终的半径图中半径误差大概是多少?
回答:在识别结果图中,虚线为平均值大约为2.58米,根据实际的环线CAD图中的测量结果,大约为2.39米,因此误差不大,如果对于平均值来说,误差基本在5%以内,如果是每个点都进行一次误差的计算,大概结果要超过5%。
问题三:整个识别结果的评价标准是什么?是否都考虑到最小值,最大值,中值等。
回答:目前识别结果只使用了平均值与实际值进行了比较评价,还未考虑到所有结果中最大值,最小值的评价结果,后续会改进这一部分,完善评价标准对模型不断优化。

通过本次中期答辩,我意识到不应将其简单认为是一次阶段检查,更应该是一次自我的提升,从这次答辩和与评审老师们的交流中发现自身问题,理解自己未考虑到的方面,这样才能不断完善,将这项工作做得更好,如果只按自己的想法一意孤行,那最后的成果一定是经不起考验。原本在答辩前我认为工作还是比较完善,但在与老师们交流后发现,仍然存在许多不足,缺少必要的评价标准和误差的考量,这对一个算法的完成十分重要。因此,这次检查是查缺补漏的好机会,后续工作我会认真领会吸收这次答辩的经验,将最终的成果丰富完善。