
【机情无限 精彩毕设】机械2026届毕业设计(论文)中期检查优秀案例分享第十七期——基于磁性人工纤毛的仿生触须传感器研究

学生姓名:王赫才
班 级:机械2022-05班
指导教师:李鑫
毕设题目:基于磁性人工纤毛的仿生触须传感器研究


一、概况
1.选题意义
在机器人智能化发展中,传感器作为与环境交互的核心器件,是感知系统升级的关键。相比易受光照、遮挡影响的视觉传感,触觉传感环境适应性强、成本低、反馈直接,成为多维感知体系的重要支撑。其中,仿生触须磁感应式方案无机械磨损、信号稳定,是触觉传感的重要研究方向。本研究聚焦于磁性人工纤毛仿生触须传感器,在技术上采用3D打印模具与硅胶浇筑工艺,为实验室条件下制作人工触须/纤毛提供了一个低成本参考方案;在应用上有为机器人提供细微的力反馈、对零部件表面形貌与粗糙度进行高精度检测、感知外界环境,进行轮廓重建等方面的潜力。
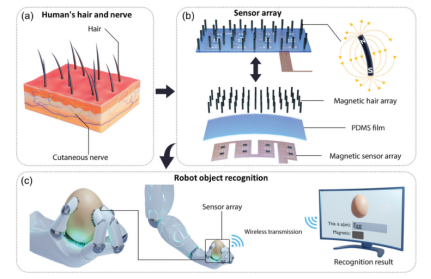
图1-1 机器人触觉传感应用
2.任务分解
本研究总体目标为研制基于磁性人工纤毛的仿生触须传感器原型,完成传感器的制备、关键性能测试及轮廓检测应用验证,建立从纤毛制备到传感应用的完整技术体系,为相关领域的精密触觉感知提供技术参考。
根据该总体目标,可将本毕业设计分解为如下子目标:
(1)完成基于3D打印模具与硅胶浇筑工艺的磁性人工纤毛可控制备,构建完整的传感器硬件原型,培养跨材料、机械与传感的系统实现能力;
(2)搭建传感器测试系统,完成纤毛顶端偏移-磁场变化量间映射关系的标定,微力测试与长期耐久性实验,获取灵敏度、稳定性等核心性能指标,基于数据验证传感器在实际工况下的可靠性,提升实验设计与数据分析能力;
(3)开展轮廓检测应用实验,建立从纤毛偏转信号到轮廓重建的数据处理流程,实现简单轮廓的高精度重构,探索仿生触须传感器在应用方面的可能性,增强工程问题解决与系统集成能力。
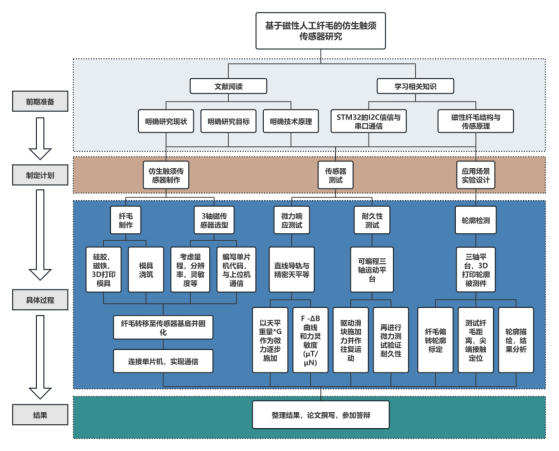
图1-2 毕业设计技术路线图
二、已完成工作
1.纤毛模具设计与纤毛制作
本研究采用SolidWorks三维建模与FDM 3D打印技术,完成磁性人工纤毛浇筑模具的三维建模与制作;以邵氏硬度20的A,B双组分硅胶为基体材料,通过分步浇筑、真空脱泡、室温固化的复合成型工艺,实现纤毛结构体的高精度成型;在纤毛结构中嵌入永磁体以赋予纤毛磁响应特性。最终制得目标圆柱形磁性人工纤毛试样,满足仿生触须传感器的传感测试与应用验证需求。
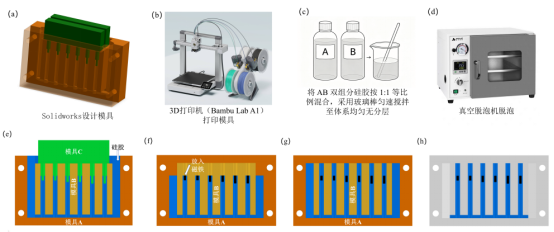
图2-1 人工纤毛制作流程示意图
2.三轴磁传感器的选型与通信
经对比市面上的模块化磁传感器,结合本研究的具体需求,最终选用MLX90393型磁传感器。该传感器具有量程大且可根据需求调节、分辨率高、价格相对较低等优点,充分契合本研究对磁信号检测的性能与经济性要求。

图2-2 三轴磁传感器MLX90393
基于MLX90393磁传感器通信协议,通过嵌入式编程实现STM32主控单元与磁传感器MLX90393的I2C总线通信,并完成芯片核心工作参数的配置与调试。采用Python语言编程实现三轴磁场分量的实时监测与动态呈现,同时完成磁场数据的规范化本地存储,为后续传感器性能标定与数据解析提供可靠的数据基础。
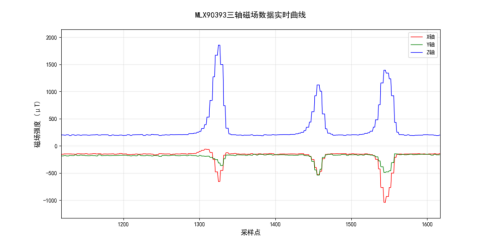
图2-3 MLX90393三轴磁场数据实时曲线
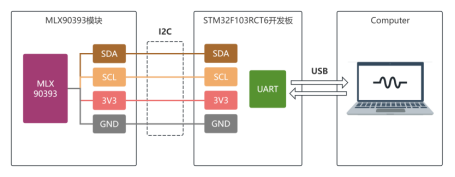
图2-4 数据采集和传输过程示意图
3.仿生触须传感器组装
根据MLX90393磁传感器模块的具体尺寸(包括定位孔位置、芯片位置等关键几何参数),使用SolidWorks 2024软件设计并建模与之相匹配的支架结构,以便将磁传感器、人工纤毛以及STM32开发板等组件合理、稳定地组装为一体,从而满足整体实验装置的空间布局与功能要求。
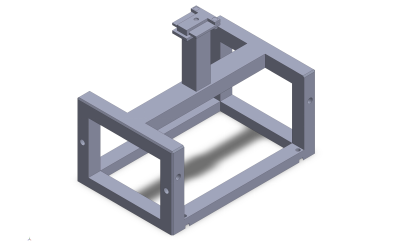
图2-5 传感器支座
4.COMSOL建模仿真
本研究测试前使用COMSOL Multiphysics 6.3软件完成磁性人工纤毛的力学与磁场建模仿真,通过精准设置材料参数、合理划分网格,模拟纤毛顶端受外界作用力的偏转情况,初步分析其力学特性与磁场分布规律,为后续实验研究提供前期理论支撑。
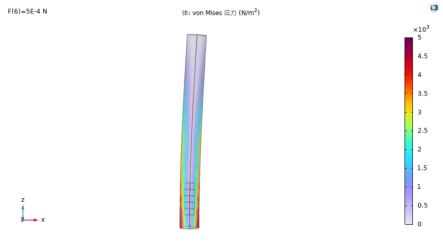
图2-6 纤毛偏转应力分布图
5.仿生触须传感器测试
(1)实验平台
本研究使用FMC4030三轴运动控制器为实验平台。FMC4030是基于32位ARM芯片研发的脉冲型三轴运动控制器,单轴脉冲输出频率最高达200kHz,内置脉冲计数功能,可实现步进电机与伺服电机的精准位置及速度控制。本研究可通过上位机实现单轴操控、自动编程运行等操作,完成仿生触须传感器的一系列测试实验。
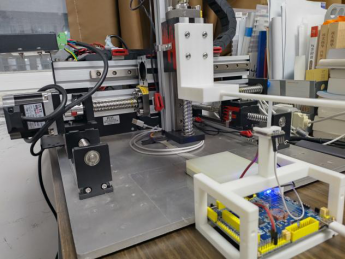
图2-7 FMC4030三轴运动控制器
(2)磁铁位置及磁铁数目对磁场影响的研究
本研究设计的仿生触须传感器采用磁响应式形变传感机制,磁铁高度位置与数目是影响传感器磁场输出量变化的关键参数,直接决定传感有效性与检测性能。故本研究搭建专用测试装置,模拟实际工况并实现磁铁参数的灵活调控,系统探究了磁铁关键参数对传感器磁场输出的影响规律。

图2-8 磁铁高度和磁铁数目对磁场的影响
(3)纤毛受外力偏转产生磁场变化的研究
基于前期磁铁关键参数对磁场输出的影响规律,筛选适配参数组合制备多组磁性人工纤毛试样。建立传感测试坐标系,依托三轴位移加载平台施加外力激励,测试并采集纤毛形变对应的磁场响应数据,结果如下图所示(n表示磁铁数目,z表示磁铁位置)。
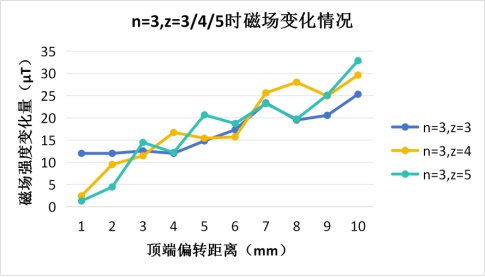
图2-9 n=3时纤毛顶端受外力后磁场变化情况
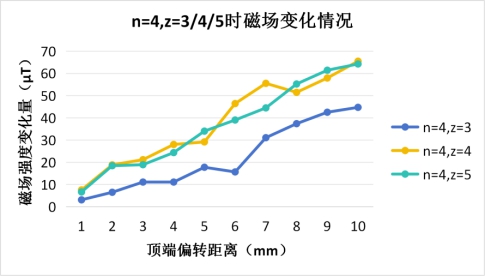
图2-10 n=4时纤毛顶端受外力后磁场变化情况
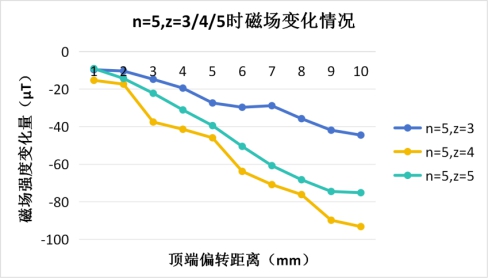
图2-11 n=5时纤毛顶端受外力后磁场变化情况
三、下一步工作计划
基于现有研究成果,后续将分阶段开展实验研究与优化工作,具体内容如下:
1.制备不同磁铁参数的磁性人工纤毛试样,测试其在外力偏转下的磁场响应特性,将实验数据与现有结果对比分析,筛选出灵敏度最优、综合性能最佳的纤毛试样。依托三轴移动平台对优选试样开展循环加载耐久性测试,模拟实际工况验证其长期力学作用下的稳定性与可靠性。
2.完成最优纤毛规格筛选与耐久性验证后,对其进行位移-磁场变化量标定实验,构建标准化映射数据集。引入机器学习算法训练位移-磁场映射模型,以均方误差,平均绝对误差和标准差为指标优化模型,实现磁场信号到纤毛偏转量与空间坐标的快速解算,为轮廓重建提供算法支撑。
3.开展仿生触须传感器轮廓重建应用验证实验,完成被测件的数字化设计与实体制备。将传感器搭载于三轴移动平台进行轮廓扫描,同步采集磁场数据,结合训练好的映射模型完成轮廓重构,系统分析实验结果并量化评估重建精度,验证传感器的实际应用性能。

问题一:你目前的工作主要体现在实验方面,理论支撑方面是否完备?
回答:目前我的研究工作虽以磁性人工纤毛制备、传感器硬件搭建与磁场响应测试等实验工作为核心,但理论支撑体系已具备完备性。前期我已通过系统梳理仿生触须传感、磁感应检测、柔性硅胶材料力学及磁场-形变耦合等领域的文献,明确了磁感应式触须传感器的磁场-形变映射机理。另外,我还使用COMSOL Multiphysics 6.3 软件完成了纤毛偏转的力学与磁场建模仿真;后续我将结合实验数据深化理论建模与机理分析,进一步强化理论与实验的耦合支撑,保障研究的理论严谨性与科学性。
问题二:撰写论文时你打算怎么把自己的研究工作写清楚、写完整,让论文内容充实饱满?
回答:我在撰写毕业论文时将沿着从理论到实验再到应用的完整研究链条,全方位呈现研究工作。首先,我会系统梳理仿生触觉传感、磁信号检测等相关理论,结合COMSOL仿真结果夯实研究理论根基;然后完整阐述磁性人工纤毛制备、传感器硬件搭建与性能测试等实验流程,辅以图表直观展示研究过程和结果;最后重点呈现轮廓重建应用成果,提炼结论与创新点,使论文结构严谨、内容充实、论证充分。

本次毕业设计中期阶段,我围绕课题完成了理论梳理、硬件制备与性能测试等核心工作,在专业知识、实践能力与科研思维上都得到了锻炼,对科研工作的系统性与严谨性有了更为深刻的理解。
通过阅读仿生触须传感与磁感应检测机理的相关文献,我深入理解了所研究的仿生触须传感器的原理,并借助COMSOL软件建模仿真将其直观呈现出来,在此过程中提升了机械、材料与仿真多学科交叉融合的能力。随后,从模具设计、磁性人工纤毛的可控制备,到MLX90393磁传感器的通信与数据可视化,传感器实验测试等一系列实践操作,让我将理论与实践相融合,极大地培养了我的逻辑分析与问题溯源的科研能力。与导师的沟通交流,也使我学会高效梳理研究思路、规范科研流程。
这段经历不仅让我明白,科研需将理论与实验深度结合,既要有扎实的知识储备,也要有严谨的实操态度;也让我树立了更清晰的科研目标与严谨的治学态度,为后续顺利完成毕业设计及未来学习科研奠定了坚实基础。