
【机情无限 精彩毕设】机械2026届毕业设计(论文)中期检查优秀案例分享第三十期——基于CANopen通信的伺服电机驱动系统设计与仿真

学生姓名:郑烜东
班 级:机械2022-05班
指导教师:李怀仙
毕设题目:基于CANopen通信的伺服电机驱动系统设计与仿真


一、概况
1.选题意义
(1)临床康复的迫切需求:随着脑卒中及脊髓损伤患者数量的增加,下肢外骨骼康复机器人已成为辅助患者重建步行功能的关键设备。本项目涉及的双髋+双膝四轴联动控制,是实现人体仿生步态的基础。研究高效、稳定的驱动系统,直接关系到康复训练的效果与患者的穿戴安全。


图1 临床患者康复 图2 双髋+双膝四轴联动控制
(2)分布式架构的必然性:传统的集中式控制在多轴扩展时存在布线复杂、实时性差的问题。采用CANopen通讯协议,可以利用其总线型拓扑结构极大地简化外骨骼的硬件布线,并通过标准化的CiA 402协议实现四个关节驱动器的时钟同步与协同运动,这对多自由度外骨骼的动态响应至关重要。
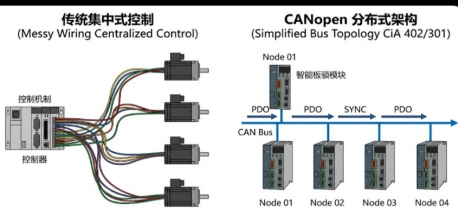
图3 集中式控制与分布式架构对比图
2.任务分解
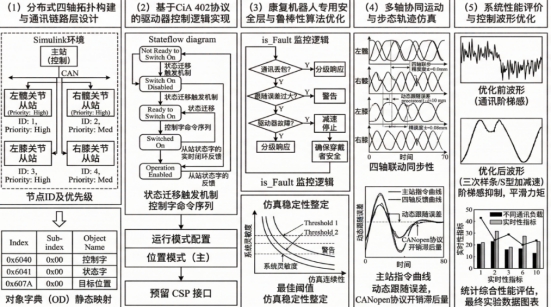
图4 任务分解图
二、已完成工作
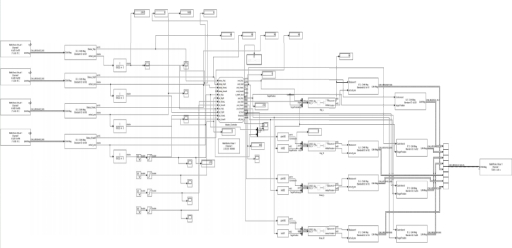
图5 基于CANopen协议的外骨骼四轴驱动仿真系统总图
1.基于分布式架构的四轴通讯链路设计
(1)多节点拓扑构建
在Simulink环境下建立了包含1个主站控制器与4个从站节点(双髋 Node 1-2,双膝 Node 3-4)的分布式仿真拓扑。
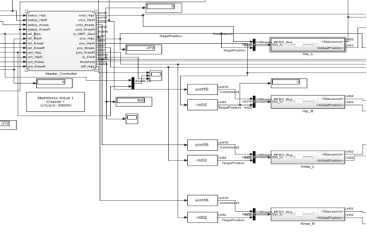
图6 主站与从站的搭建
(2)高精度报文编解码
针对外骨骼位置反馈的高精度要求,设计了32位有符号数的CAN报文映射算法。
攻克了“负数反馈截断”问题。通过重新设计Saturation模块的下限逻辑与补码解析算法,解决了32位位置信息在8字节数据场传输过程中的溢出与数据跳变,确保了步态数据的完整性。
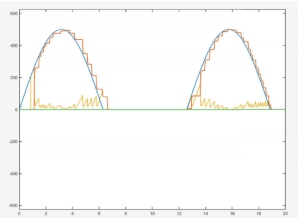
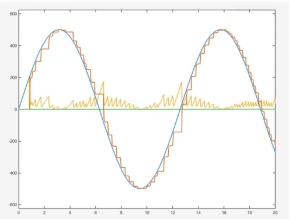
图7 负数反馈截断优化前 图8 负数反馈截断优化后
2.符合 CiA 402 标准的驱动器状态机逻辑实现
(1)有限状态机建模
利用Stateflow严格实现了CiA 402标准定义的驱动器状态转换。包括从“未就绪”到“使能运行”的完整握手流程。
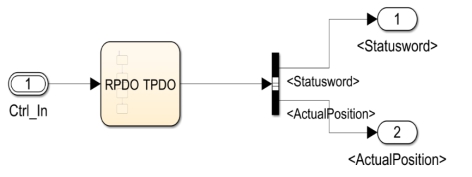
图9 关节从站(Slave Node)内部控制逻辑与协议集成模型
通过将CiA402协议栈封装于独立的Slave子系统内,实现了控制逻辑的高度复用。
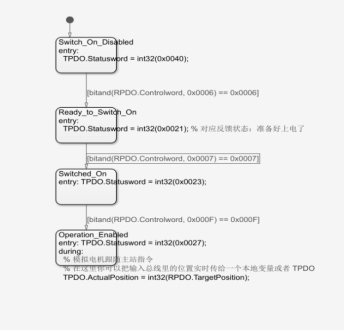
图10 Simulink/Stateflow 环境下自主构建的伺服驱动器状态机模型
(2)多轴同步切换
实现了四轴控制字与状态字的并行解析,确保了外骨骼在启动阶段四个关节能够同步进入使能状态,避免了因关节上电时序不一导致的人体穿戴冲击。
3.系统鲁棒性优化与动态安全监控算法
动态初始阈值缓冲算法:针对伺服系统在启动瞬间由于传感器波动导致的“开机秒报错”难题,创新性地引入了基于Entry变量的初始大阈值缓冲逻辑。
在系统进入Enable状态的起始阶段自动放宽误差限,待运行平稳后自动收紧。该算法有效解决了非定常初始过冲问题。
运行实时报错机制:建立了多层级故障检测体系,经过反复仿真测试,设计了自适应误差监控策略,在启动瞬态(0.2s内)自动放宽阈值以兼容初始过冲,在稳态运行期自动收紧阈值至800单位,平衡了系统的安全性与灵敏度,解决了模型频繁闪退的工程痛点。
三、下一步工作计划
1.运动平滑性与轨迹插补算法优化
针对目前仿真波形中存在的“阶梯感”与量化噪声,引入高阶插补算法(如五次多项式插补或S型加减速算法),在主站轨迹规划层对步态数据进行预处理。预期消除电机输出转矩的非预期波动,使外骨骼各关节运动更加柔顺,提升康复训练过程中的人体穿戴舒适度。
2.多轴同步机制(SYNC)的深度实现
针对双髋、双膝关节间的动态同步相位差,研究并实现CANopen协议中的同步对象机制。通过主站周期性发送SYNC报文,触发四个从站节点同步锁存指令并同步更新反馈。预期将四轴间的同步偏差控制在微秒级,确保复杂的步态动作(如支撑相与摆动相的无缝切换)高度协调。
3.实验数据采集与毕业论文撰写
进行全工况仿真实验,记录不同通讯频率、不同步态速度下系统的动态跟随误差,生成对比曲线图表。完成论文初稿,重点撰写“基于CiA 402协议的状态机设计”与“分布式系统鲁棒性优化”章节。根据导师意见修改论文,准备答辩PPT及仿真演示视频。预期提交一篇逻辑严密、数据详实、具有工程参考价值的毕业论文。

问题一:你在工作计划中提到要通过高阶插补来抑制波形的“阶梯感”。从控制理论角度看,这种阶梯感本质上是采样频率不足与量化噪声的叠加。请问:在你的分布式四轴系统中,如果为了追求更平滑的波形而盲目提高 PDO 的发送频率,会对 CAN 总线的利用率产生什么影响?你如何确定一个“既能保证平滑度、又不引起总线拥塞”的最优通讯周期?
回答:首先进行带宽评估CAN总线的带宽是有限的。四轴联动意味着每个周期主站要发4个RPDO,收4个TPDO。如果频率过高,会导致报文在总线上排队,产生不可预测的通讯抖动,反而加剧阶梯感。我想采取一个折中方案,解决阶梯感不应单纯依赖通讯频率。我采用的思路是“低频通讯+高阶插补”,我会根据康复步态中关节运动的最大角速度,依据奈奎斯特采样定律确定最小采样频率。剩下的平滑工作交给主站的五次多项式插补或从站驱动器内部的线性插补,这样可以在较低的总线负载下获得极高的运动柔顺度。
问题二:你在从站中严格实现了CiA 402状态机,并在主站设计了is_Fault监控逻辑。但在实际穿戴应用中,存在一种极端情况:如果仅有一个关节发生“跟随误差过大”触发Fault状态锁死,而其他三个关节仍在执行预定的步态轨迹,这会对患者造成极大的扭转伤害。 你的Master控制器如何实现“一轴故障,全系统协同停机”的逻辑?这在分布式 NMT 网络管理中是如何体现的?
回答:我的主站并不是独立看待四个从站的。在Stateflow逻辑中,四个从站的状态位是通过位运算连接的。一旦监控算法检测到任一轴的is_Fault变真,主站会瞬间触发全局保护逻辑:指令层立即将四个轴的目标位置重置为当前的实际位置,防止电机继续旋转。通讯层通过CANopen的NMT报文发送“进入预操作状态”或“关闭所有节点电力使能”的广播指令。这种分布式协同设计确保了外骨骼作为一种“人体增材”,在局部失效时能保持整体力学结构的稳态,避免对患者造成二次损伤。

1.深度掌握分布式架构与工业协议栈
在项目初期,我对通信的理解仅停留在“数据传输”层面。通过搭建双髋+双膝四轴联动控制系统,我深刻体会到了分布式架构相较于传统集中式控制在简化布线和增强扩展性上的巨大优势。在解决 32 位有符号位置数据映射失配问题时,我深入研究了补码解析与符号位丢失机理。这次“负数反馈截断”问题的成功修复,让我意识到底层协议一致性对于高精度步态反馈的重要性。
2.建立了医疗级安全与系统鲁棒性的意识
外骨骼机器人作为辅助患者重建功能的关键设备,安全永远是第一优先级。针对传感器噪声导致的“上电秒报错”难题,我没有选择简单地屏蔽错误,而是设计了动态初始阈值缓冲算法。通过引入Entry变量在启动瞬间放宽误差限、稳态后自动收紧,我学会了如何在系统灵敏度与仿真连续性之间寻找最佳平衡点。这种“先松后紧”的策略,是纯理论模型向实际工程落地的关键一步。